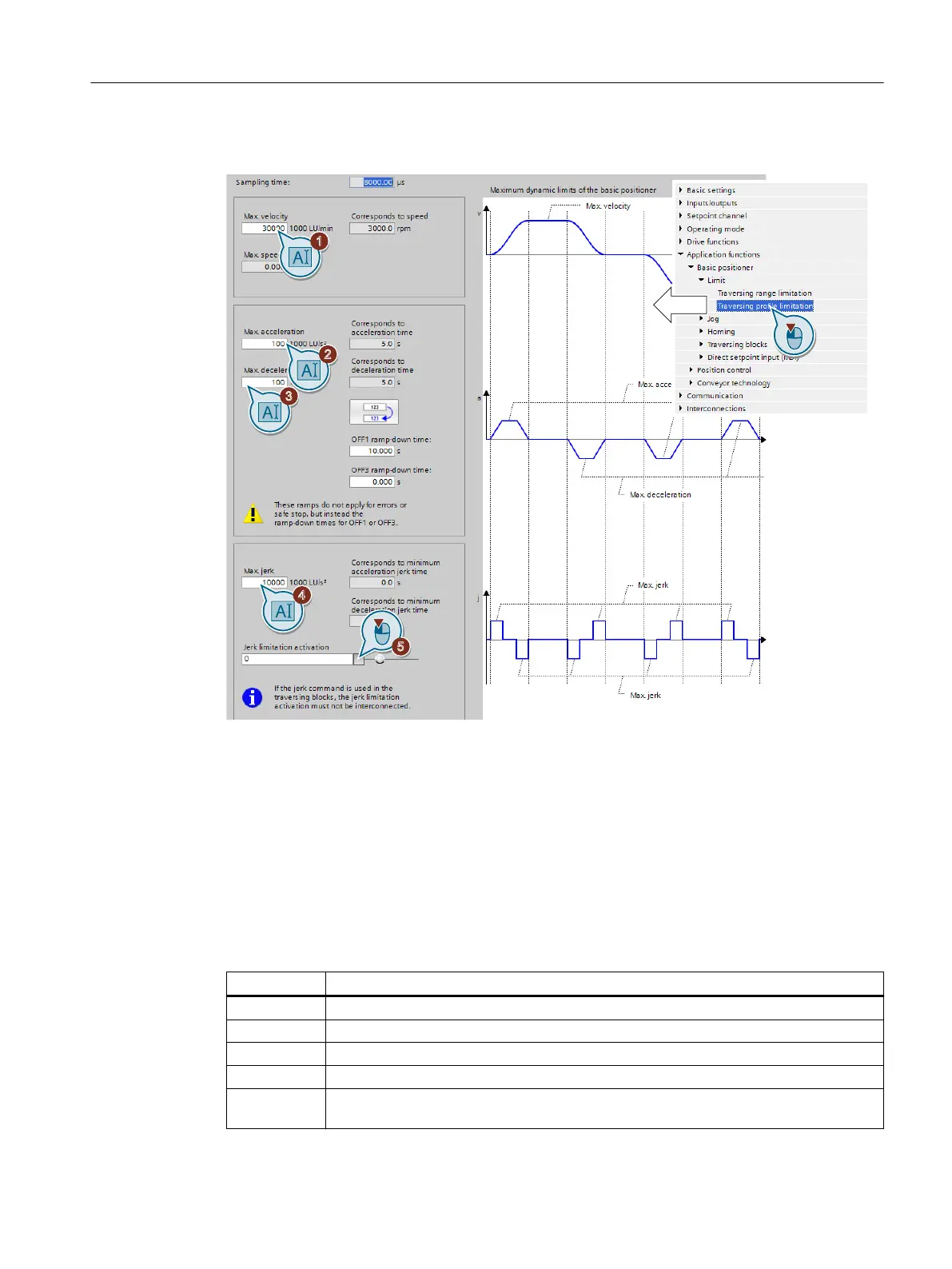
Procedure
1. Set the maximum velocity with which the converter may position the axis.
2. Set the maximum acceleration.
3. Set the maximum delay.
The "override" in the traversing blocks or for the direct setpoint input refers to the values ②
and ③.
4. Reduce the maximum jerk, if you require softer acceleration and braking.
5. For permanent jerk limiting, set this signal to 1.
You have now set the limitation of the traversing prole.
❒
Parameter Meaning
p2571 Maximum velocity
p2572 Maximum acceleration
p2573 Maximum deceleration
p2574 Jerk limiting
p2575 Activating jerk limiting
1 signal: Jerk limiting is active
Commissioning
6.4 Setting the position controller
Basic positioner
Function Manual, 09/2020, FW V4.7 SP13, A5E34257659B AG 51

 Loading...
Loading...

























