6.6 Referencing
6.6.1 Referencing methods
Overview
If you are using an incremental encoder for the position actual value, after the supply voltage is
switched o, the converter loses its valid position actual value. After the supply voltage is
switched on again, the converter no longer knows the reference of the axis position to the
machine.
Referencing re-establishes the reference between the zero point of the position calculated in the
converter and the machine zero point.
Absolute encoders retain their position information, even after the supply has been switched o.
The converter oers various ways of referencing the axis:
• Reference point approach - only with incremental encoders
• Flying referencing - with all encoder types
• Set reference point - with all encoder types
• Absolute encoder adjustment - with absolute encoders
Reference point approach
The converter automatically traverses the axis to a dened reference point.
Example: A workpiece must be positioned at a
starting point before machining starts.
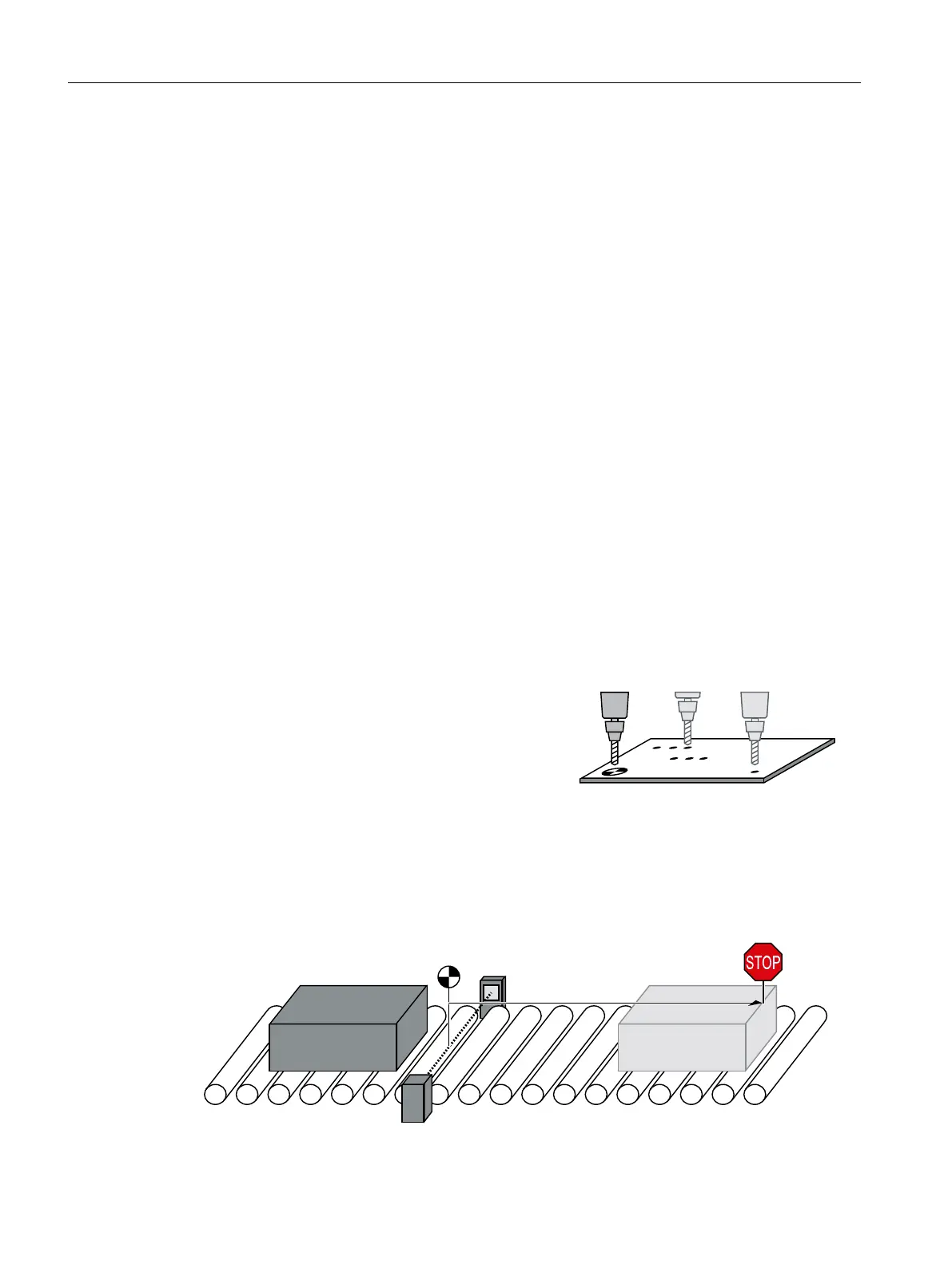
Flying referencing
The converter corrects its position actual value while traversing and reduces errors, e.g. caused
by wheel slip or a gear ratio that has not been precisely set.
Example: A pallet on a roller conveyor must be stopped at a specic position. However, the exact
position of the pallet on the conveyor is only known when a sensor is passed.
Figure 6-7 Positioning an item to be transported on a roller conveyor
Commissioning
6.6 Referencing
Basic positioner
56 Function Manual, 09/2020, FW V4.7 SP13, A5E34257659B AG

 Loading...
Loading...

























