Description: The machine data deterrmines the accelerations and jerks which are applied in the case
of positioning axis motion.
Value 0:
The acceleration is taken from the first field entry in MD32300 $MA_MAX_AX_ACCEL
(value for DYNNORM).
With G75 and active jerk limitation (SOFT), the jerk is taken from the first field
entry
in MD32431
$MA_MAX_AX_JERK (value for DYNNORM); without jerk limitation (BRISK)
it is infinite.
The following applies for all other positioning axis movements:
If MD32420 $MA_JOG_AND_POS_JERK_ENABLE is true, the jerk is taken from MD32430
$MA_JOG_AND_POS_MAX_JERK; otherwise it is infinite (BRISK behavior).
Value 1:
The acceleration is taken from the second field entry in MD32300 $MA_MAX_AX_ACCEL
(value for DYNPOS).
The jerk is taken from the second field entry in MD32431 $MA_MAX_AX_JERK (value for
DYNPOS).
For BRISK behavior, enter very high values here.
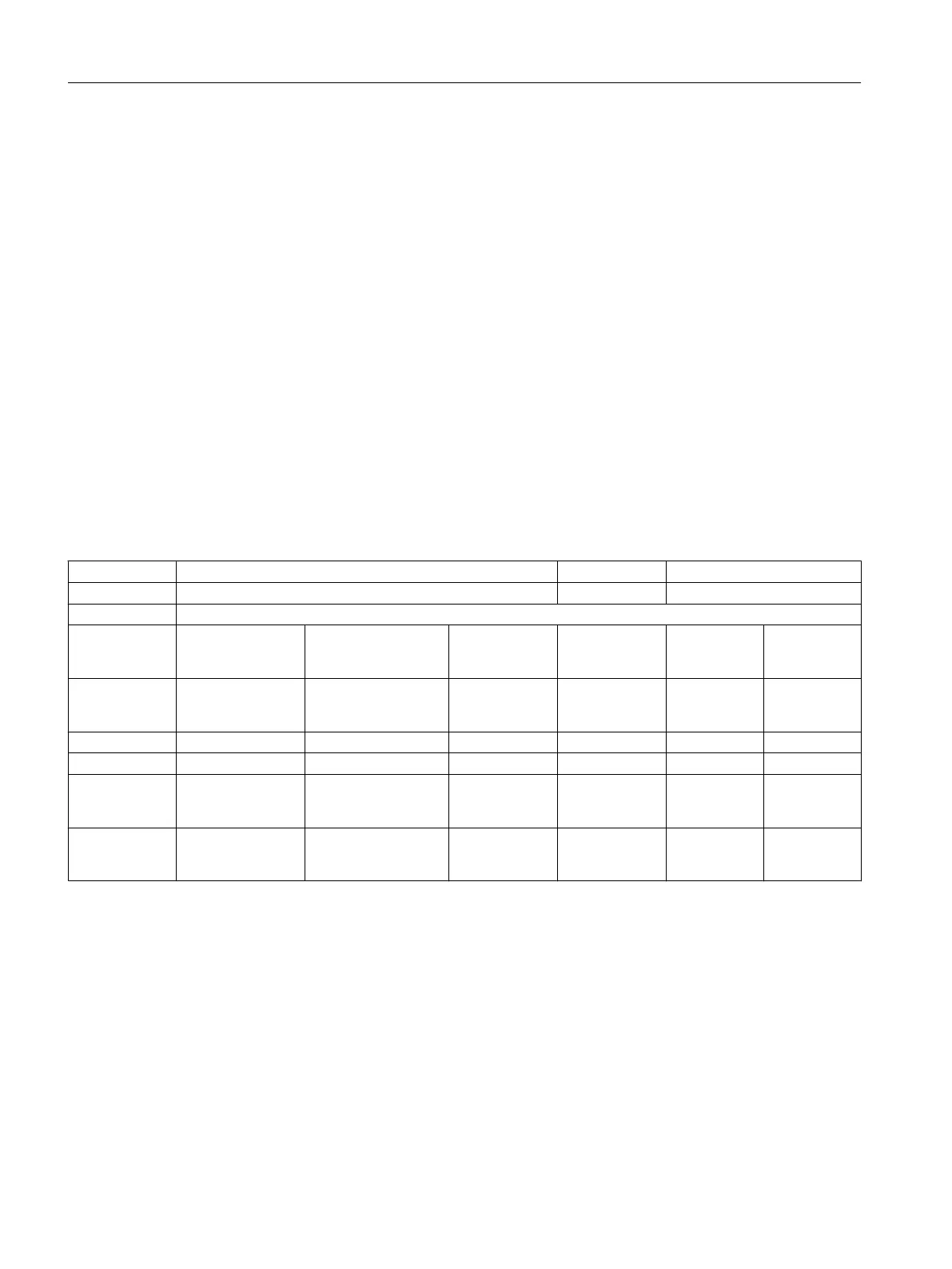
3.3 Channel-specific machine data
20060 AXCONF_GEOAX_NAME_TAB C01, C11, C10 F2, V2, M1, K2
- Geometry axis name in channel STRING PowerOn
-
808d-me42 3 X, Y, Z, X, Y, Z, X, Y, Z,
X,
Y, Z,
X, Y, Z, X, Y, Z,
X, Y, Z, X...
- - 1/1 M
808d-me62 3 X, Y, Z, X, Y, Z, X, Y, Z,
X, Y, Z,
X, Y, Z, X, Y, Z,
X, Y, Z, X...
- - 1/1 M
808d-te42 3 X, , Z - - 1/1 M
808d-te62 3 X, , Z - - 1/1 M
808d-mte40 3 X, Y, Z, X, Y, Z, X, Y, Z,
X,
Y, Z, X, Y, Z, X, Y, Z,
X, Y, Z, X...
- - 1/1 M
808d-mte60 3 X, Y, Z, X, Y, Z, X, Y, Z,
X, Y, Z,
X, Y, Z, X, Y, Z,
X, Y, Z, X...
- - 1/1 M
Description: This MD is used to enter the names of the geometry axes separately for each channel.
Geometry axes can be programmed in the part program using the names specified here.
Special cases:
Machine data
3.3 Channel-specific machine data
Parameter Manual
110 Parameter Manual, 08/2015, 6FC5397-8EP40-0BA1

 Loading...
Loading...












