Modbus RS485 Stepper Drive User Manual
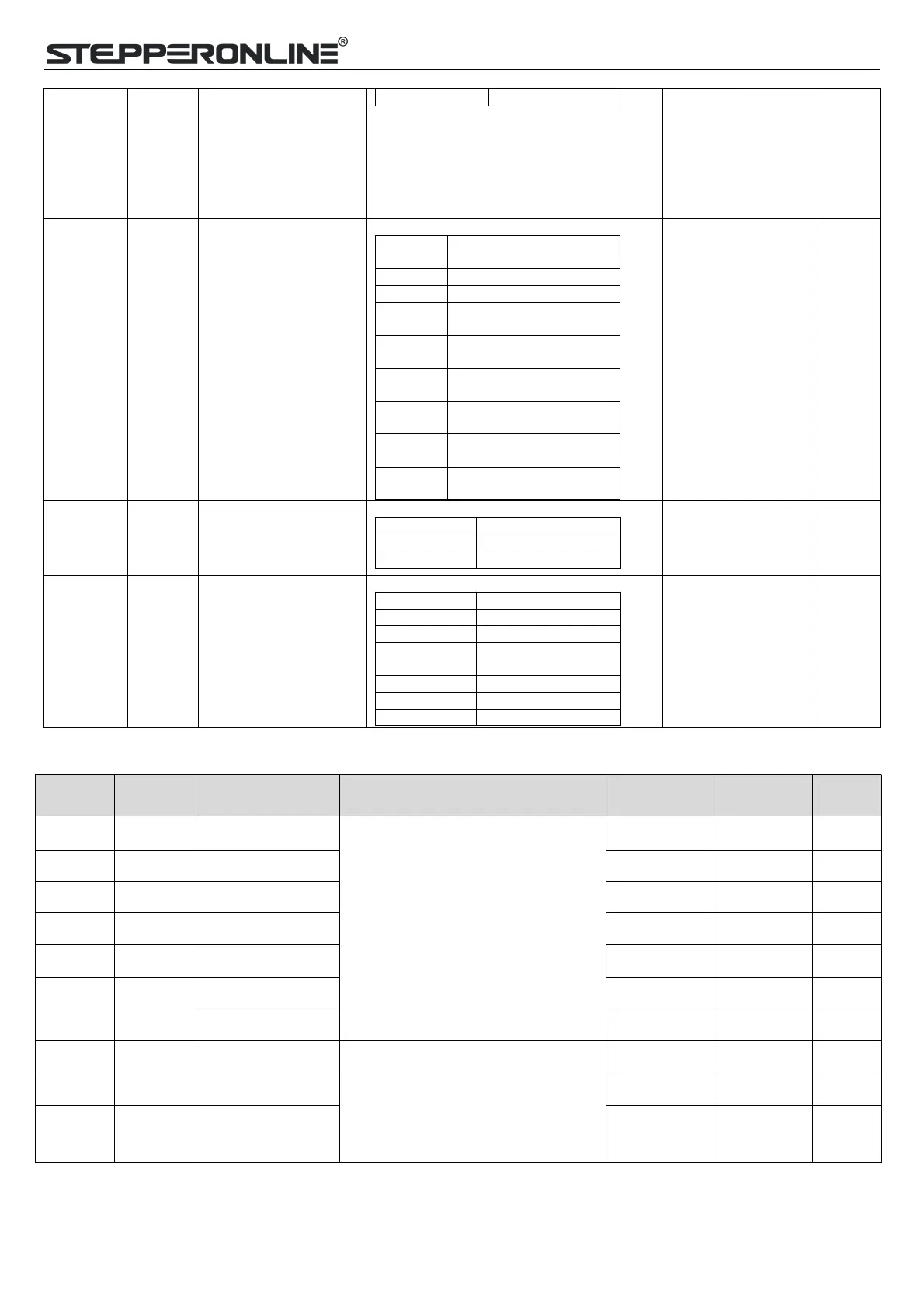
Save all parameters to
EEPROM
Parameter reset(exclude
motor parameters)
All parameters are reset
to factory
Save all mappings into
EEPROM
JOG CW (Need to write
once at least 50ms)
JOG CCW (Need to
write once at least 50ms)
Save parameter status
word
4.3.2 Input and Output Parameters
(1) SI1 is set to enable by default, N.C
(normally closed).
(2) Other inputs are N.O (normally
open) by default.
(3) The value of bit7 of each input
register is set normally closed or
normally open, bit7=1 is normally
closed, bit7=0 is normally closed
(1) All outputs are N.O (normally open)
by default,
(2) The value of bit7 of each input
register is set normally closed or
normally open, bit7=1 is normally
closed, bit7=0 is normally closed.
Note: (1) If the input or output function is set repeatedly, only after the restart drive can detect it.
(2)When input functions are configured, it is effective after clicking save and restart drive.