SunFounder PiCrawler Kit
2. Now, run servo_zeroing.py in the examples/ folder.
cd ~/picrawler/examples
sudo python3 servo_zeroing.py
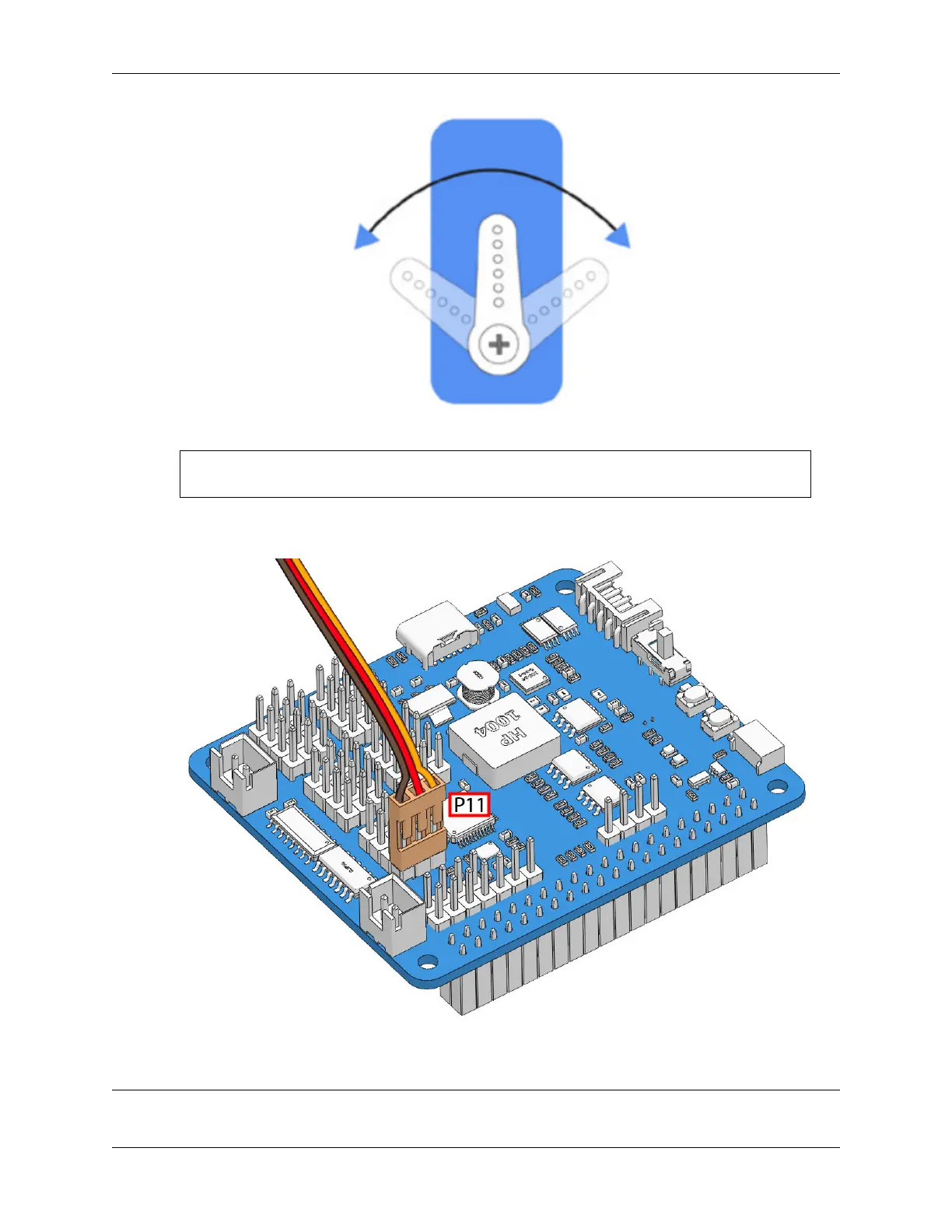
3. Next, plug the servo cable into the P11 port as follows, at the same time you will see the servo arm rotate to a
position(This is the 0° position, which is a random location and may not be vertical or parallel.).
4. Now, remove the servo arm, ensuring the servo wire remains connected, and do not turn off the power. Then
continue the assembly following the paper instructions.
Note:
36 Chapter 3. Play with Python