SunFounder PiCrawler Kit
By the way: the step_list called in the first method also consists of an array containing 4 coordinate values.
step_list = {
"stand":[
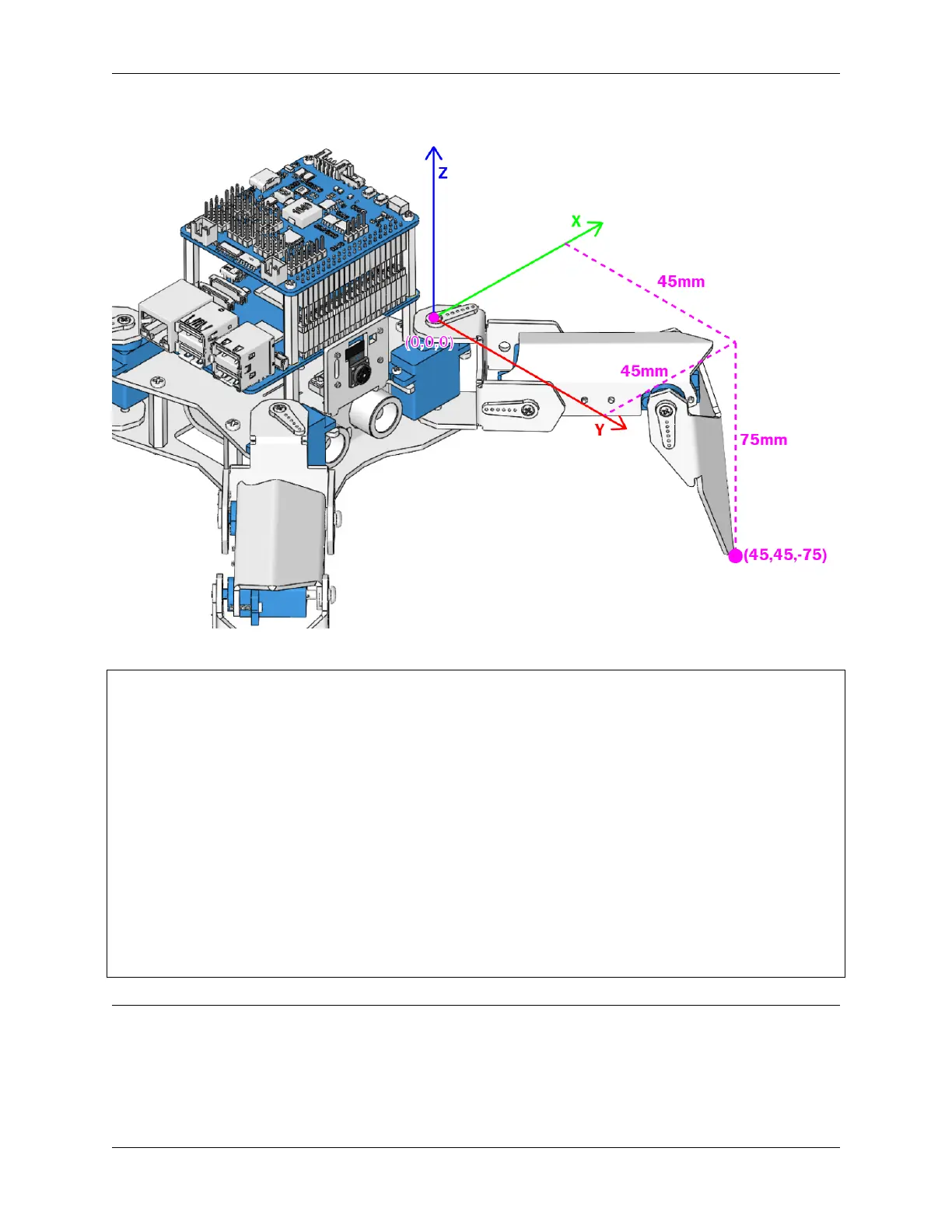
[45, 45, -50],
[45, 45, -50],
[45, 45, -50],
[45, 45, -50]
],
"sit":[
[45, 45, -30],
[45, 45, -30],
[45, 45, -30],
[45, 45, -30]
],
}
Note: Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook!
Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
• Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
3.11. Pose 71