Taco® SKV
18
302-365, Effective: June 5, 2017
© 2017 Taco, Inc.
8.4 Typical Terminal Wiring Configurations
The unit connection blocks are shown in “Figure 8-14: Control Terminal Locations” on page 16.
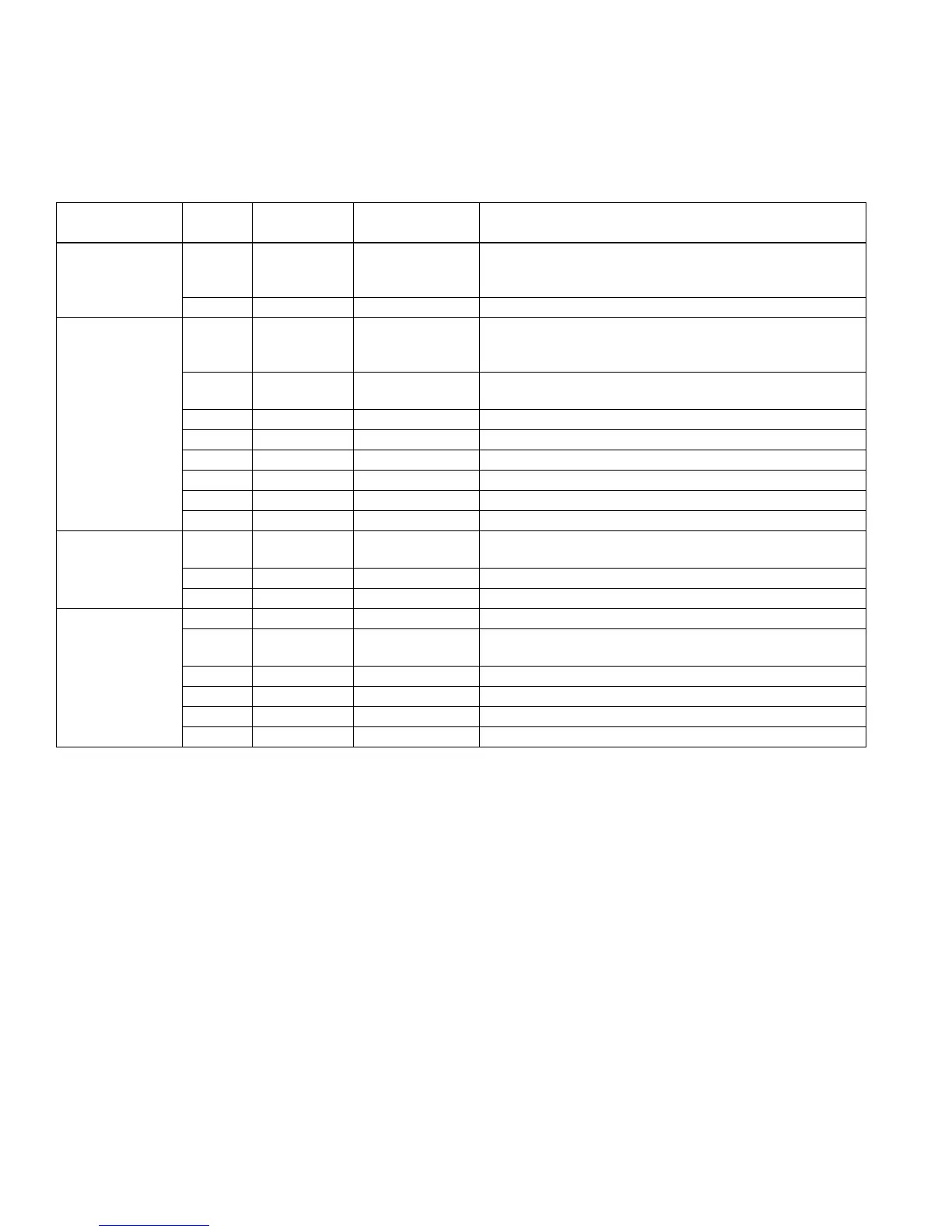
Table 2: Control Terminal Information
Terminal
number
Parameter Default setting Description
Relay Outputs 01, 02, 03 5-40 Relay 1 [160] No Alarm Form C Relay Output. Used for AC or DC voltages and either
resistive or inductive loads. see the following section on relay
wiring for contact current and voltage ratings.
04, 05, 06 5-40 Relay 2 [5] Running
Connector 1 12, 13 - +24 V DC 24 V DC supply voltage. Maximum output current is 200 mA
total for all 24 V loads. Intended for digital inputs, external
transducers.
18 5-10 [8] Start Start/Stop digital input signal for the drive. Connect input to 24
V to start. Open the input to stop the drive.
19 5-11 [0] No Operation Digital input (not used)
27 5-12 [0] No Operation Digital input (not used)
29 5-13 [0] No Operation Digital input (not used)
32 5-14 [0] No Operation Digital input (not used)
33 5-15 [0] No Operation Digital input (not used)
20 - Common Common for digital inputs and reference for 24 V supply
Connector 2 61 - Shield Connection Integrated RC filter for cable shield. ONLY for connecting the
shield when experiencing EMC problems.
68 8-3 + RS485 Interface (+)
69 8-3 - RS485 Interface (-)
Connector 3 39 - AO Common Common for analog output
42 6-50 4-20mA Motor
Freq
Analog output. Default setting is 4-20mA signal (500 ohms
maximum) based on motor speed.
50 - +10 V DC 10 V DC analog supply voltage. 15mA max.
53 6-1 [0] No Operation Analog input 53.
54 6-2 [0] No Operation Analog input 54.
55 - AI Common Common for analog input.