All rights reserved 37 Servicemanual_UR3_en_rev3.1.2
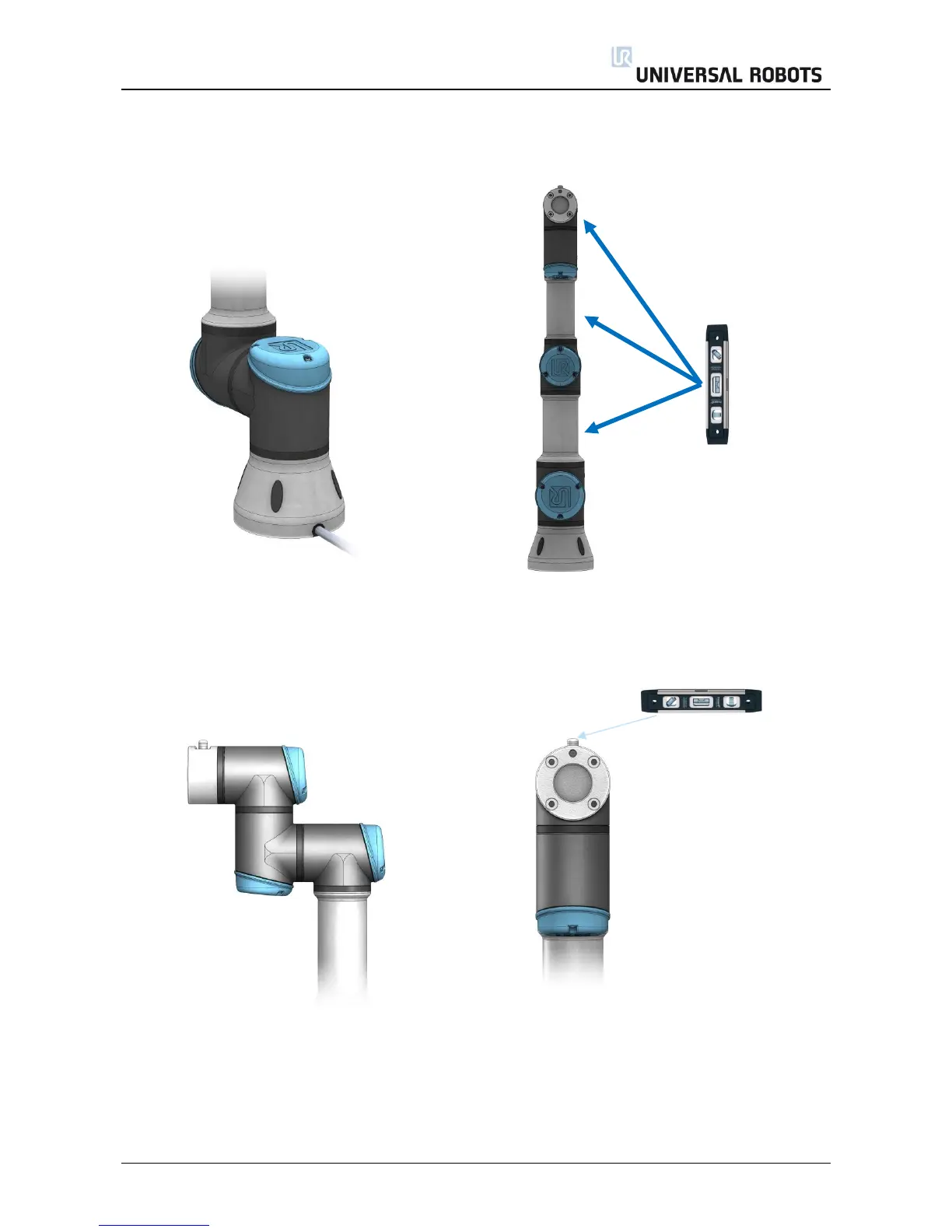
Zero position illustrations
Base: Shoulder, Elbow, Wrist 1:
Base zero position is aligned so that the Shoulder, Elbow and Wrist 1 zero output flange is
output flange is offset 180 degree from vertical aligned (if Base if horizontal).
the slot for cable in back of robot base. Make sure that base of robot is horizontal, use
spirit level to align joints.
Wrist 2: Wrist 3:
Wrist 2 zero position is aligned similar Wrist 3 zero position is aligned so tool connector
to Base joint, with tool flange parallel is pointing upward.
with wrist Mount two bolts in tool holes and use spirit level
to align joint.