All rights reserved 94 Servicemanual_UR3_en_rev3.1.2
5.3.5 Checklist after a collision
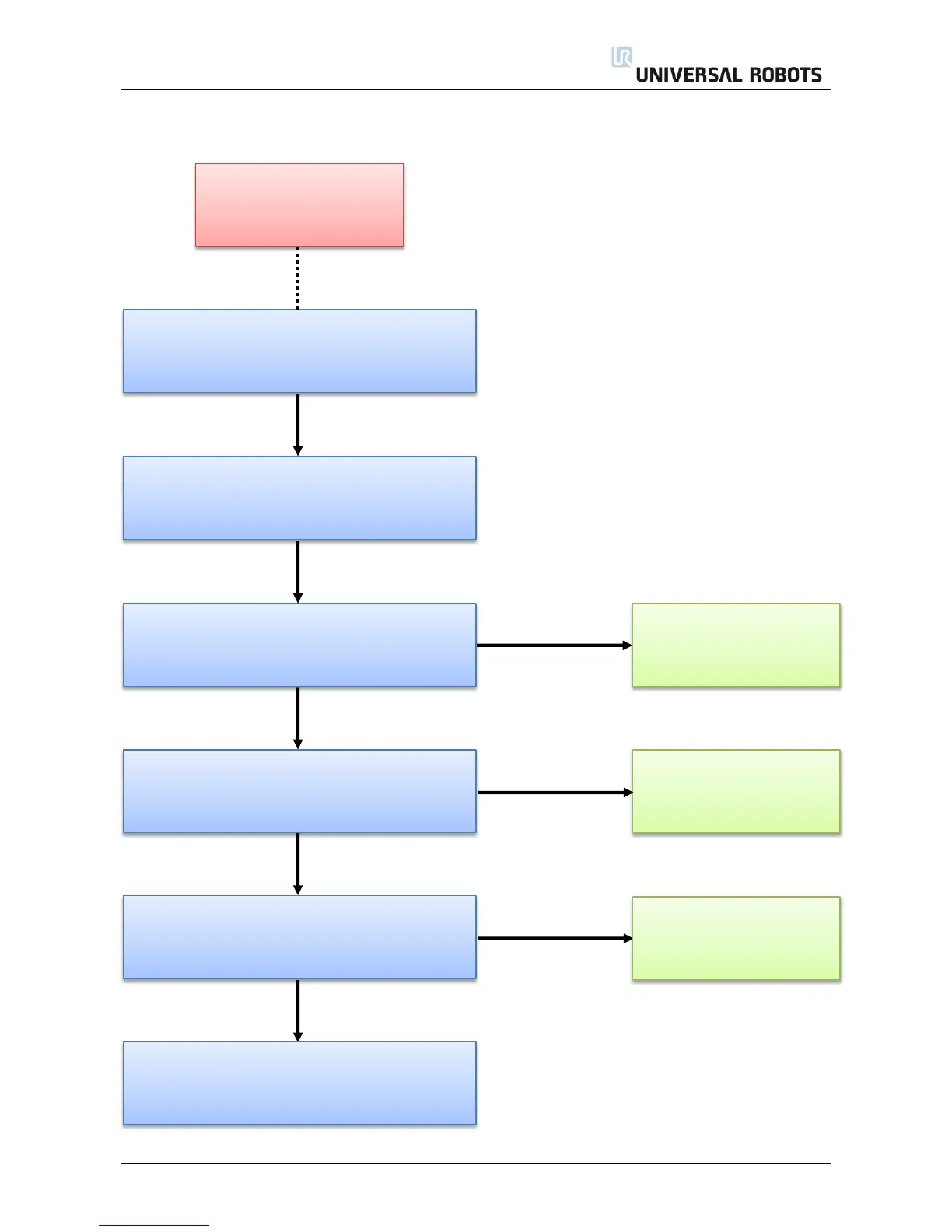
Checklist after a collision
Remove lid and inspect
parts inside of joint
Visually inspect robot arm.
Are any parts visually damaged, like damages on
Stop robot program and eventually press the
Emergency button prior to entering the work cell
Press free drive button on back of TP and check
the free drive function of all joints > any abnormal
friction or behavior observed?
Inspect joint with abnormal
behavior
Check log history for error messages and consult
the section Error Codes for detailed explanation
Press free drive button on back of TP and check
the free drive function of all joints > any excessive
noise observed?
Inspect joint with abnormal
noise. If click noises appear,
check brake pin
Start the robot program in reduced speed and
verify robot is running as intended