1. Shut down the controller.
2. Remove alignment screw.
3. Gently remove black flexible flat ring with a tiny screwdriver or similar tool and twist it
around the joint housing.
4. Slide the grey Teflon ring back. 8 screws become visible, 4 on each side of joint. Loosen
the screws with a 5.5 mm. open-ended spanner about two full turns, approximately 3 mm.
for each screw.
5. Pull the tool flange and Wrist 3 joint apart and gently twist the two parts in opposite
directions around 8 mm. until a mechanical stop is met (holes are keyhole-type).
6. Pull away the tool flange from Wrist 3 joint.
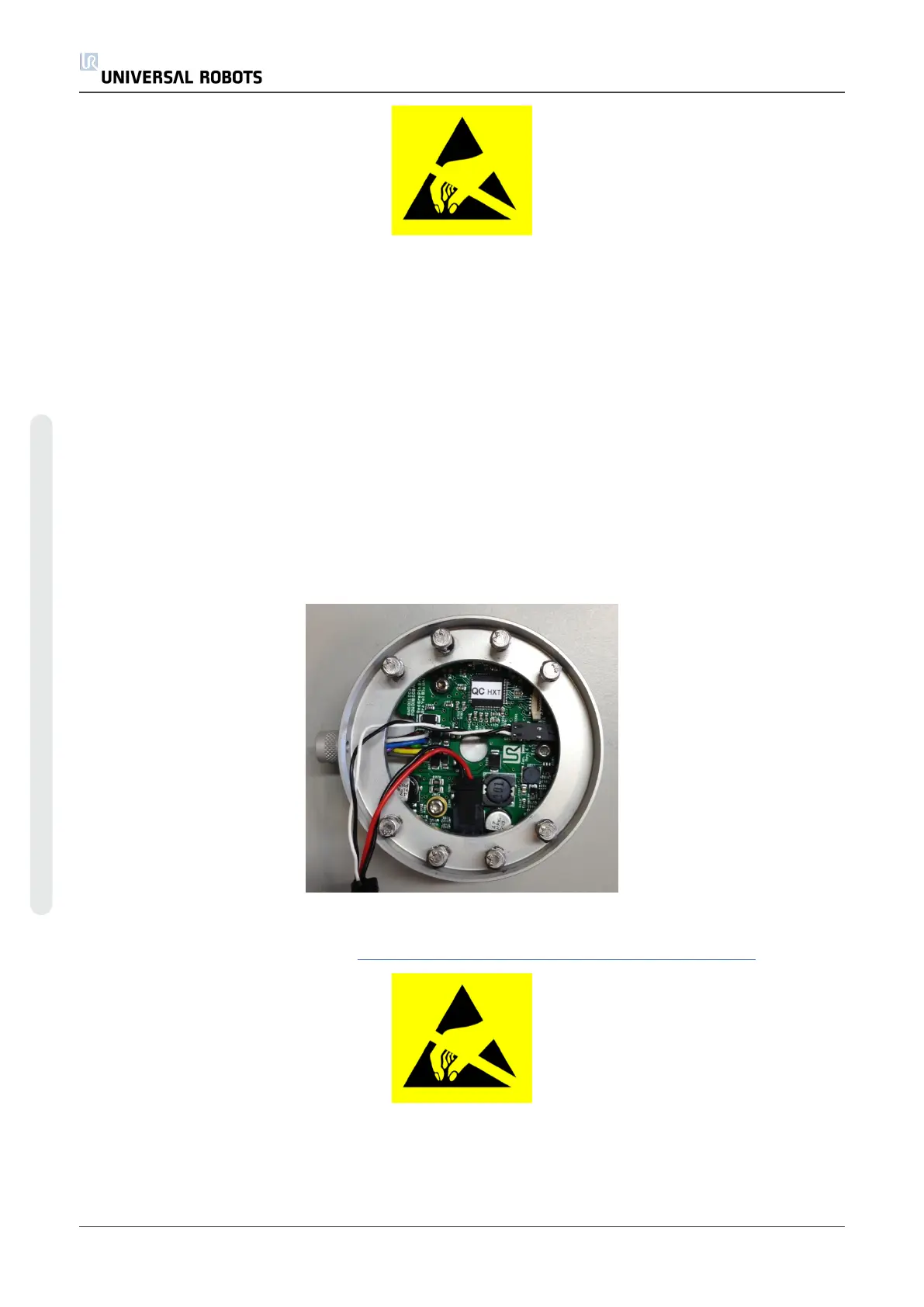
7. Connect ESD wristband
8. Disconnect the two connectors.
Assemble
For details and photos please see: General guidance to separate joint from counterpart
UR5 34 Service Manual
5.Service and Replacement of parts
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.