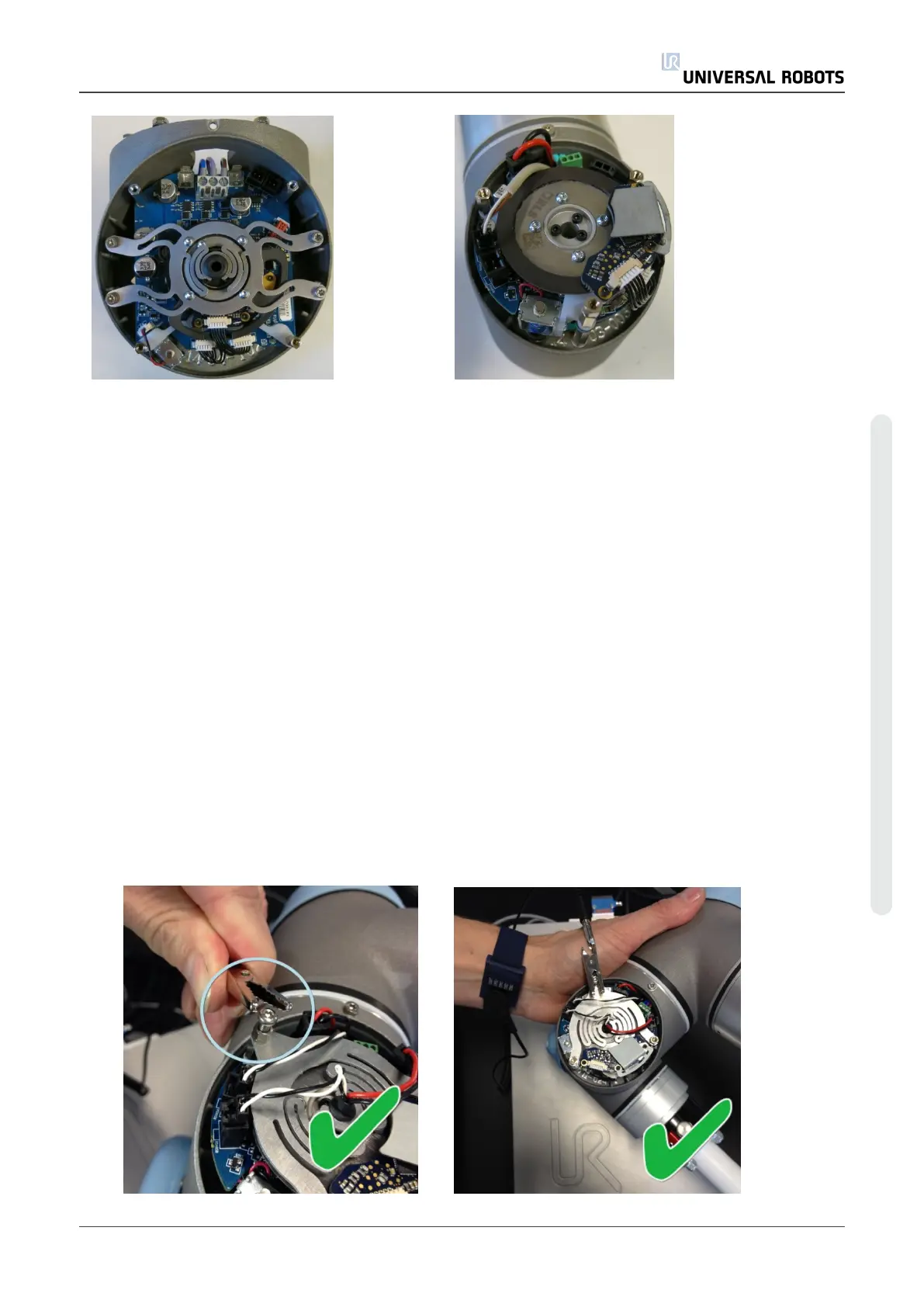
Brake on Base, Shoulder and Elbow joints Brake on Wrist joints
4. Make sure to replace blue lid onto joint correctly and fasten screws before turning on
Controller.
5. Correct torque value for screws on blue lids are 0.4Nm
5.2.4. General Guidance to Separate Joint from Counterpart
Disassemble
1. Ensure that the necessary tools and documentation are available before starting the repair.
1. Service kit with torque tools, ESD Wristband, etc.
2. Thoroughly read and understand this guide.
2. Move the robot to a comfortable position for disassembly or if necessary dismount entire
robot arm from work cell and place on a solid surface.
3. Shut down the controller.
4. Remove blue lid.
5. Reattach one of the screws from the blue lids, and connect the Alligator Clip from the ESD
wristband to it, as shown below.
Service Manual 19 UR5
5.Service and Replacement of parts
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.