Decelerate stop. Change to inertia motion state after stop.
Torque setting: P4-06 urgent stop torque.
Notes: (1) P0-06.H=0,1, servo enable signal will be forced OFF when overtravel signal arrives.
P0-06.H=3, servo enable signal will be forced OFF after motor stop when overtravel signal
arrives. P0-06.H=2, servo enable signal will not be forced OFF as long as the servo enable
signal is always effective.
(2) stop condition depends on rotate checking speed P5-02, unit rpm.
Related parameter settings:
Notes: if this parameter set too small, the motor will stop slowly.
5-2-4. Overtravel Limit (P-OT & N-OT)
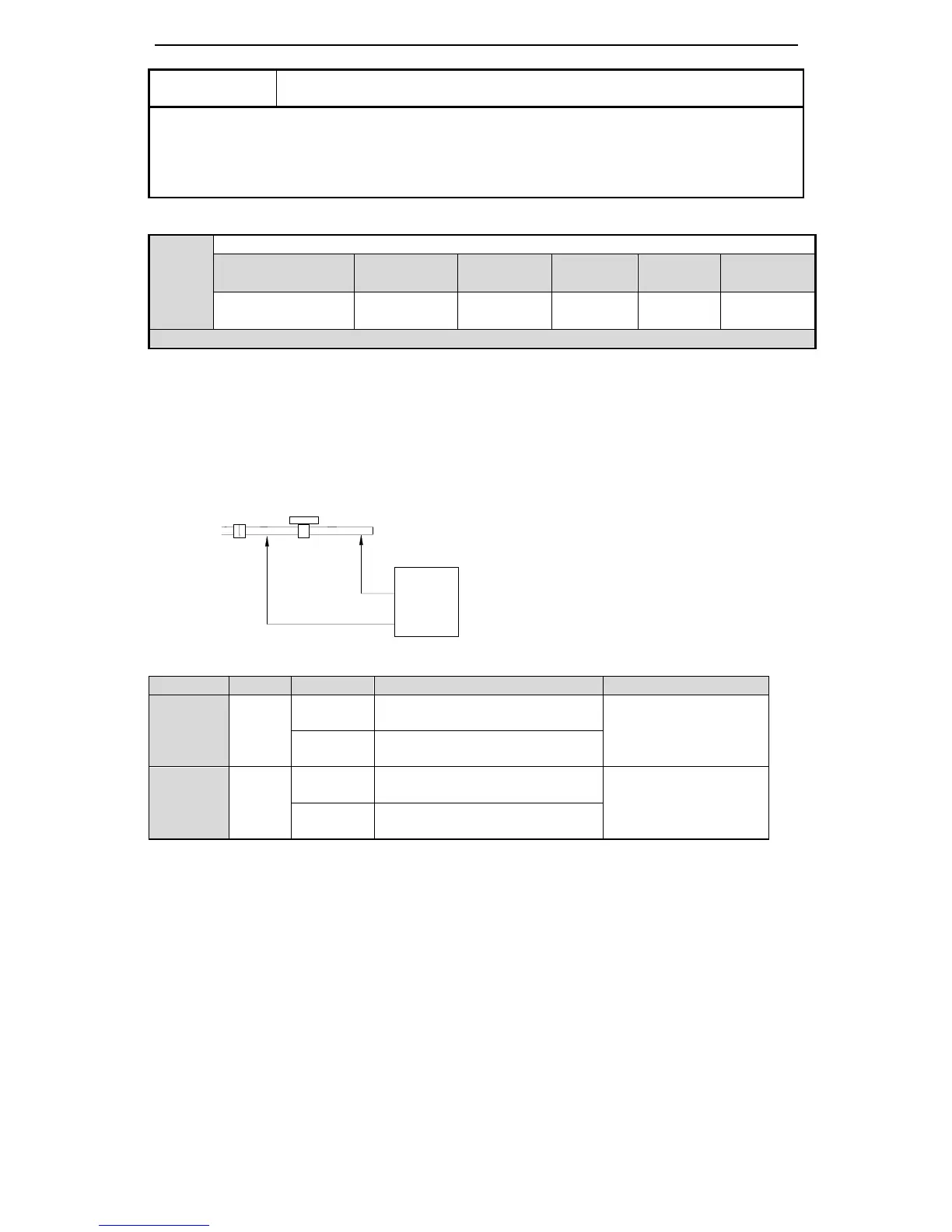
(1) Use the overtravel signal
Please connect P-OT and N-OT to the limit switch. Make sure to wiring as the following diagram when
linear driving to avoid machine damagement.
(2) Set the overtravel signal
SI3=ON, prohibit the forward
running
SI3=ON, allow the forward
running
SI4=ON, prohibit the reverse
running
SI4=ON, allow the reverse
running
Note:
1. /P-OT, /N-OT can be changed to other terminal input via parameter P5-12 and P5-13.
2. In position control, there is position offset pulse when stop the motor via overtravel signal. Please
input clear signal /CLR to clear the offset.
3. In position control, if the servo still can receive pulse when stop the motor via overtravel signal,
these pulses will accumulate until the servo alarm.
4. The input terminals function cannot be the same. Please refer to chapter 5-12-1.
 Loading...
Loading...
