80
CHAPTER2 PROFIBUS Unit
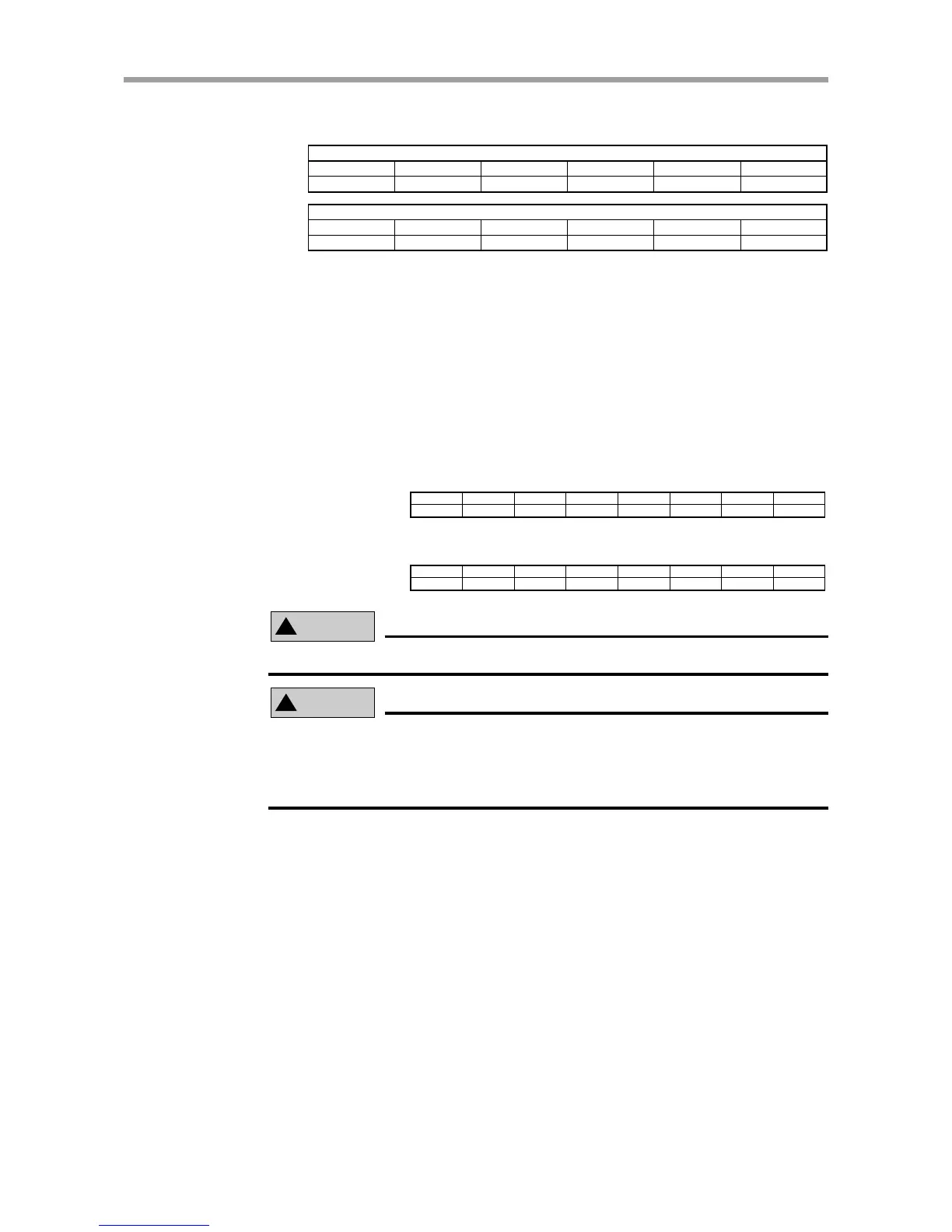
(14) Distance specification arch motion definition .................... Code 010E
The arch motion of the distance specification is defined.
Command option
QWn+22
QWn+20 QWn+18 QWn+16
QWn+14 QWn+12
Specified distance
Axis
Command response
IWm+22
IWm+20 IWm+18 IWm+16
IWm+14 IWm+12
(Details)
Axis: It is the execution axis number of the arch motion. 1 means X axis,
and 2 means Y axis.
Specified distance:
It is the movement position (relative position of origin reference)
of the arch motion execution axis.
The position can be specified in the range of -9999 to 9999 in the
millimeter units.
(Example)
Transmission example 1:
The arch motion in which Y axis returns by -100.00 is defined.
QWn+22
QWn+20 QWn+18 QWn+16
QWn+14 QWn+12
QWn+10
QWn+8
0000
0000 0000
0000
FF9C 0002
0000 010E
Response example 1:
It is normally ended.
IWm+22
IWm+20 IWm+18 IWm+16
IWm+14 IWm+12
IWm+10
IWm+8
0000
0000 0000
0000
0000 0000
0000 0200
!
CAUTION
This command is invalid for single-axis controllers.
!
CAUTION
Since the current position on the program does not vary if the movement is in-
terrupted due to the stop (interlock), etc., the movement can be continued by
executing the command again. However, if resetting is executed, the current po-
sition on the program will be initialized at the position of the robot.