4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-36
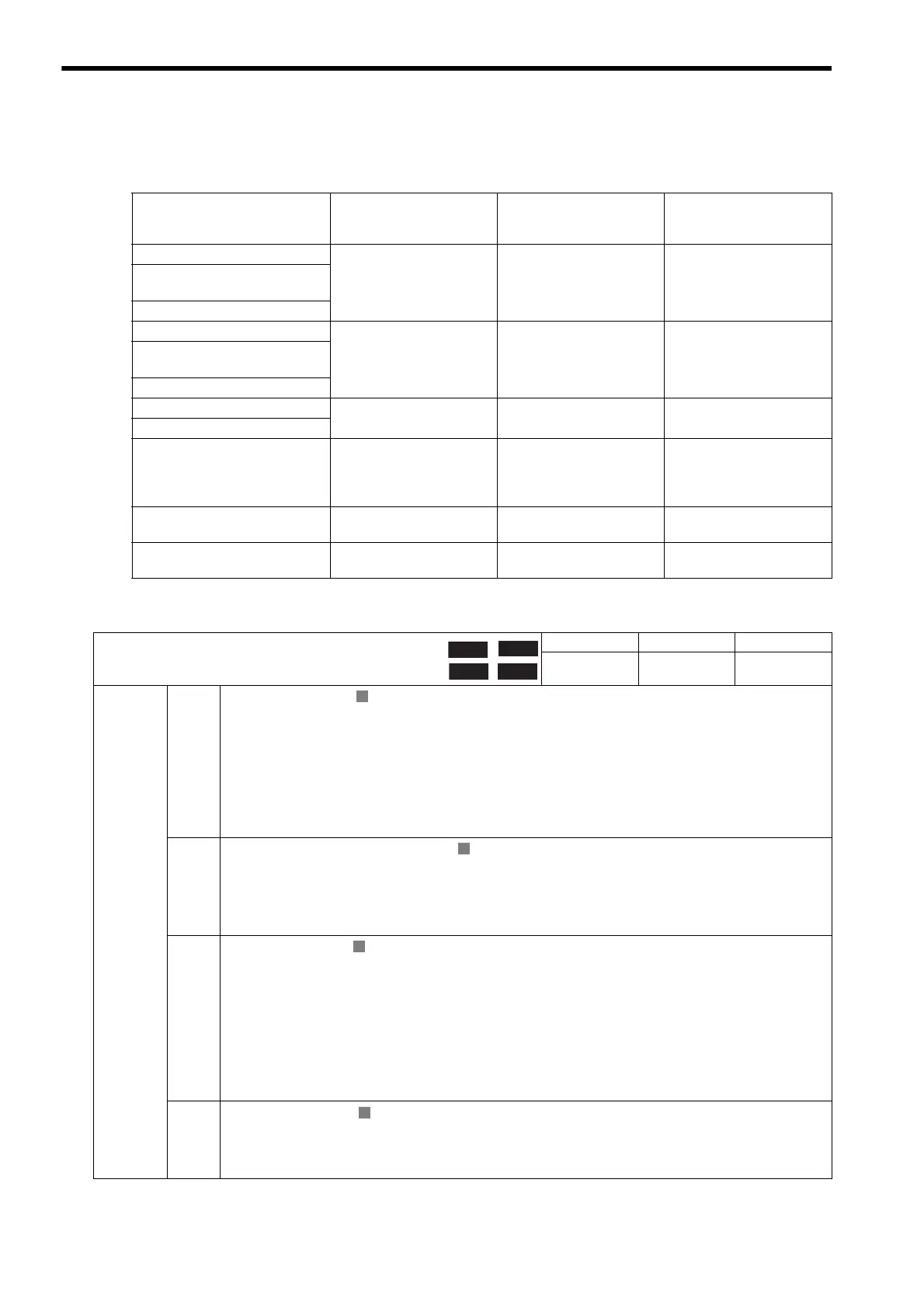
[ b ] Timing of Stop Mode Selection (OW02, bit 8 to F)
The following table shows when the selected stop mode will be enabled while a move command is executed.
( 4 ) Function Setting 1
Move Commands
When a command is
interrupted.
(OW09 Bit 1=ON)
When a command is
changed.
When an error occurs.
POSING (Positioning)
Stops according to the stop
mode selected.
Stops according to the stop
mode selected.
Stops according to the stop
mode selected.
EX_POSING (External input po-
sitioning)
ZRET (Zero point return)
INTERPOLATE (Interpolation)
––
Stops according to the stop
mode selected.
ENDOF_INTERPOLATE
(For system use)
LATCH (Latch)
FEED (JOG operation)
Stops according to the stop
mode selected.
Stops according to the stop
mode selected.
Stops according to the stop
mode selected.
STEP (STEP operation)
VELO (Speed reference)
Stops according to the stop
mode selected. Only avail-
able when the stop mode is
set to 0 or 1.
Stops according to the stop
mode selected. Only avail-
able when the stop mode is
set to 0 or 1.
Stops according to the stop
mode selected. Only avail-
able when the stop mode is
set to 0 or 1.
TRQ (Torque/thrust reference)
Stops according to the stop
mode selected.
Stops according to the stop
mode selected.
Stops according to the stop
mode selected.
PHASE (Phase reference)
––
Stops according to the stop
mode selected.
OW03
Function Setting 1
Setting Range Setting Unit Default Value
−−0011H
Description
Bit 0 to
Bit 3
Speed Unit Selection
Set the unit for speed references.
0: Reference unit/s
1: 10
n
reference unit/min (default) (n = number of decimal places/fixed parameter 5)
2: 0.01%
3: 0.0001%
Refer to 5.1.5 Speed Reference for setting examples when also setting of the combination
with the number of digits below the decimal point.
Bit 4 to
Bit 7
Acceleration/Deceleration Degree Unit
Set whether to specify acceleration/deceleration rates or acceleration/deceleration time constants for accelera-
tion/deceleration commands.
0: Reference units/s
2
1: ms (default)
Bit 8 to
Bit B
Filter Type Selection
Set the acceleration/deceleration filter type.
The set filter type changes when the motion command Change Filter Type is executed.
0: None (default)
1: Exponential acceleration/deceleration filter
2: Moving average filter
When a filter is used, set the type in this parameter and execute the motion command Change
Filter Type.
For details, refer to 6.2.12 Change Filter Type (CHG_FILTER).
Bit C to
Bit F
Torque Unit Selection
Set the unit for torque references.
0: 0.01% (default)
1: 0.0001%