4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-46
( 18 ) Error Count Alarm Detection
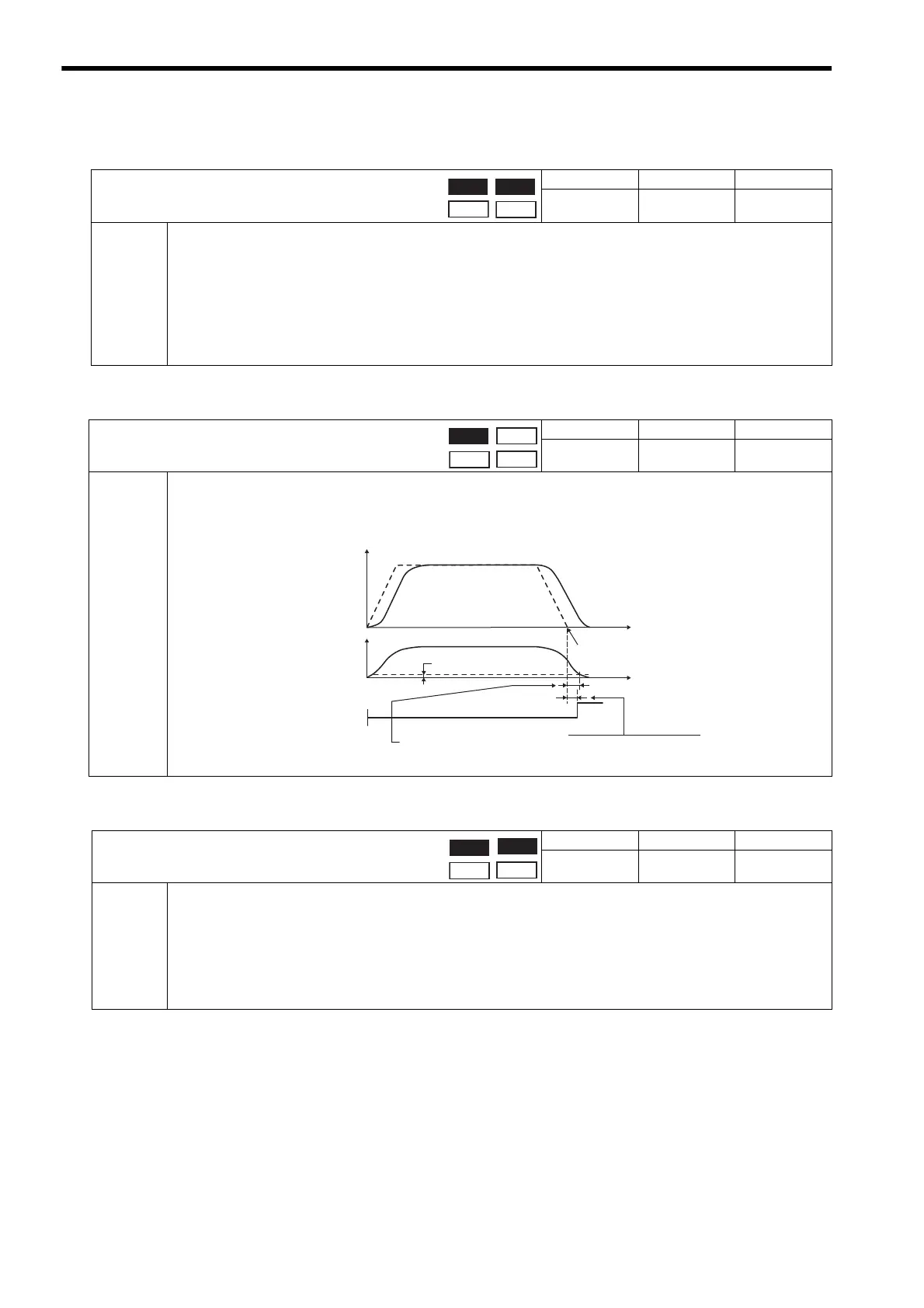
( 19 ) Positioning Completion Check Time
( 20 ) Phase Correction Setting
OL22
Error Count Alarm Detection
Setting Range Setting Unit Default Value
0 to 2
31
−1
Reference unit
2
31
−1
Description
Set the value to detect an excessively following error during position control.
The Excessive Deviation (IL04, bit 9) is set to 1 (ON) if the Position Error (monitoring parameter IL1A) is
greater than the Error Count Alarm Detection. An excessive error will not be detected if this value is set to 0.
Related Parameters
An excessive error can be set to be treated either as a warning or as an alarm in the Excessive Deviation Error Level Set-
ting in Mode Setting 1 (setting parameter OW01, bit 0).
OW01, bit 0 = 0: Alarm (default) (stops axis operation)
OW01, bit 0 = 1: Warning (continues axis operation)
OW26
Position Completion Check Time
Setting Range Setting Unit Default Value
0 to 65535 ms 0
Description
Set the time to detect a positioning time over error.
If the Positioning Completed bit does not turn ON within the time set here after reference pulses have been distributed
during position control, a Positioning Time Over alarm (monitoring parameter IL04, bit 6) will occur. The comple-
tion of positioning will not be checked if this parameter is set to 0.
OL28
Phase Correction Setting
Setting Range Setting Unit Default Value
−2
31
to 2
31
−1
Reference unit 0
Description
Set the phase correction amount in reference units for phase reference commands.
<Using as Electronic Shaft>
Use this parameter to compensate for reference pulses in control systems without rigidity, in which higher gain cannot be
applied.
<Using as Electronic Cam>
Use this parameter as the target position for the cam pattern with incremental addition.
Refer to 6.2.24 Phase References (PHASE) for details on phase reference commands.
Speed
Time
Time
Position Error
Width of Positioning Completion
When this time is longer than the Positioning Completion
Check Time, a Positioning Time Over alarm will occur.
Discharging
Completed
Positioning
Time Over