6-1
159328-1CD
HW1480497
MS80W Manipulator
6 Allowable Load for Wrist Axis and Wrist Flange
6.1 Allowable Wrist Load
6 Allowable Load for Wrist Axis and Wrist Flange
6.1 Allowable Wrist Load
The allowable wrist load is 80 kg.
As shown in Table 6-1 Allowable Wrist Load, the moment of each axis is
restricted. Observe the conditions described in this section in applying
load on the wrist.
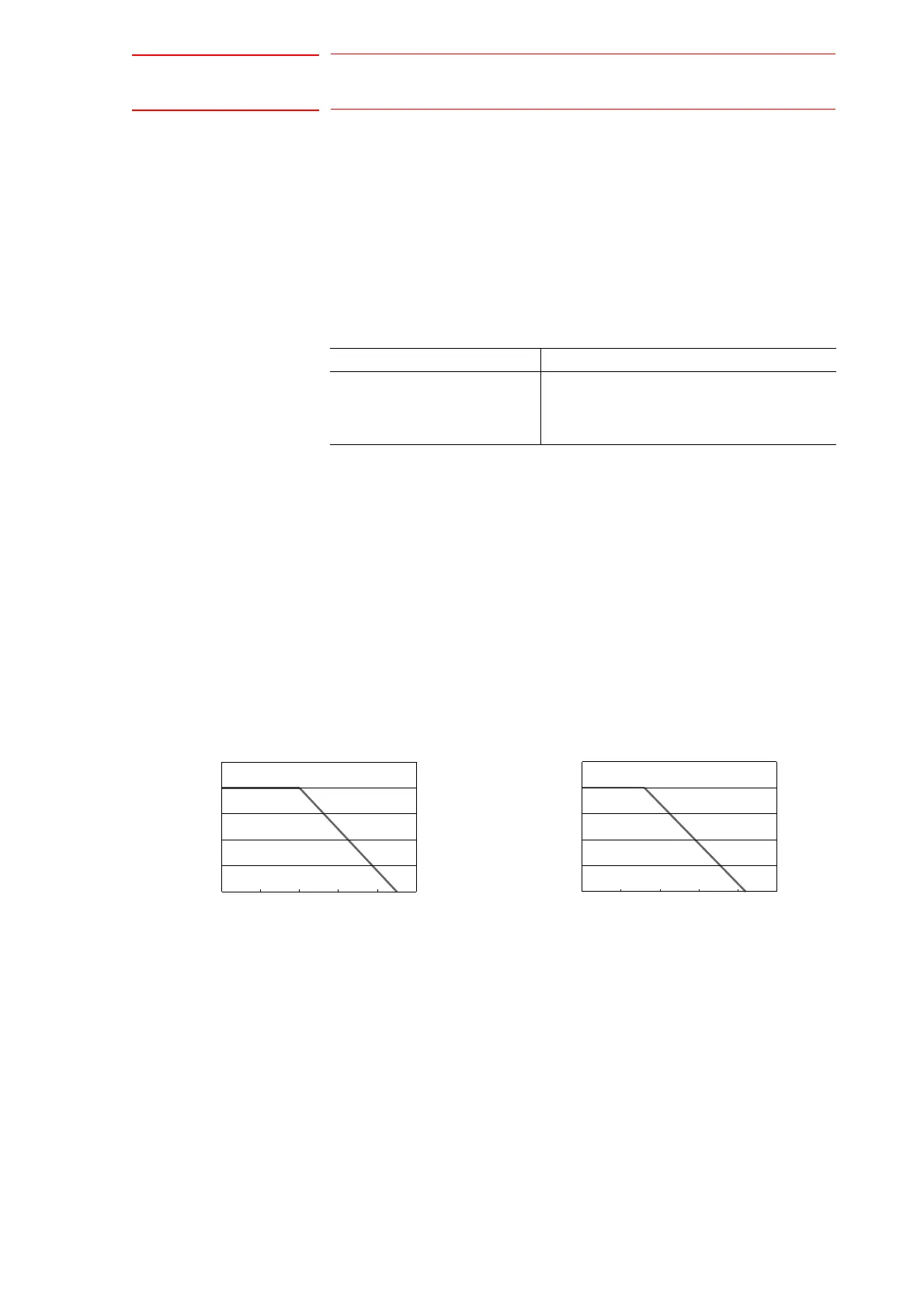
The allowable total moment of inertia changes according to the load
moment as shown in the Fig.6-1(a Allowable Total Moment of Inertia on R-
, B-axes and Fig.6-1(b Allowable Total Moment of Inertia on T-axis. The
manipulator shall be operated fulfilling the conditions in these charts. For
example, when the load moment on the T-axis is 20 kgf•m, the allowable
total moment of inertia is 8 kg•m
2
; the allowable total moment of inertia
becomes 21 kg•m
2
if the load moment is 0 kg•m.
Table 6-1: Allowable Wrist Load
Axis Moment N•m (kgf•m)
1)
1 ( ): Gravitational unit
R-axis
B-axis
T-axis
392 (40)
392 (40)
196 (20)
Fig. 6-1(a): Allowable Total Moment of Inertia on
R-, B-axes
Fig. 6-1(b): Allowable Total Moment of Inertia on
T-axis
Moment
(kgf
m)
Total Moment of Inertia (kgm )
GD /4
2
2
50
40
30
20
10
0
45 50403020100
Moment
(kgf
m)
Total Moment of Inertia (kgm
2
)
21
25
20
15
10
5
0
82520151050
GD
2
/4