YS-S4 Multi-rotor Autopilot User Manual V1.4
17
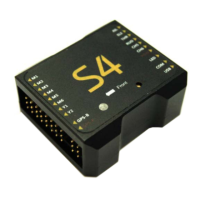
3) Selectyourownoperationstyleinthehandmodemenu.Theillustrationshows“JapanHand”whichis
Mode1.
Step2Calibratethesticks
Clickthebutton“AdjustTransmitter”onGCS“Data”andclick"OK"inthedialogbox.Movebothstickstotheir
endpointsinacircularmotionwithin5Seconds.Theautopilotwillstorethemaximumandminimumendpoints
andalsothemidpointsofbothsticks.
6.5 Fail/SafeChecking
Step1CheckthatFlightModeschangeonTXcommand:
1) CheckFlightModesviatheConfigurationsoftware‘FlightMode’:
AssumingyourGPSmoduleisconnected;checkwhetherswitchingbetweenallworkingmodesisworking
normally.
Forexample:PlaceCH5atposition1andCH6atposition1,thePCGCS"data"pageshouldshowyourTXstatusas
"Manual",ChangeCH5toposition2forAutoHoverandsoon.Ifflightmodedoesnotchangewhenyoutoggle
theswitchespleasecheckyourhardwareconnectionsor
RCTransmittersetup.
Step2:FailSafe(F/S)Checking
1) HowtocheckdefaultF/S
SWITCHOFFtheRCTransmitterwhilsttheautopilotisstillpoweredon;the‘Flight‐Mode’shouldswitchto
display"ReturnandLand",thethrottlestickindicatorshouldbeinthemiddleanddisplayedinGREEN.Ifitdoes
not,pleasesetupthefail‐safe(F/S)again.ItisstronglyrecommendedtousethedefaultF/S.
2) HowtocheckoptionalF/S