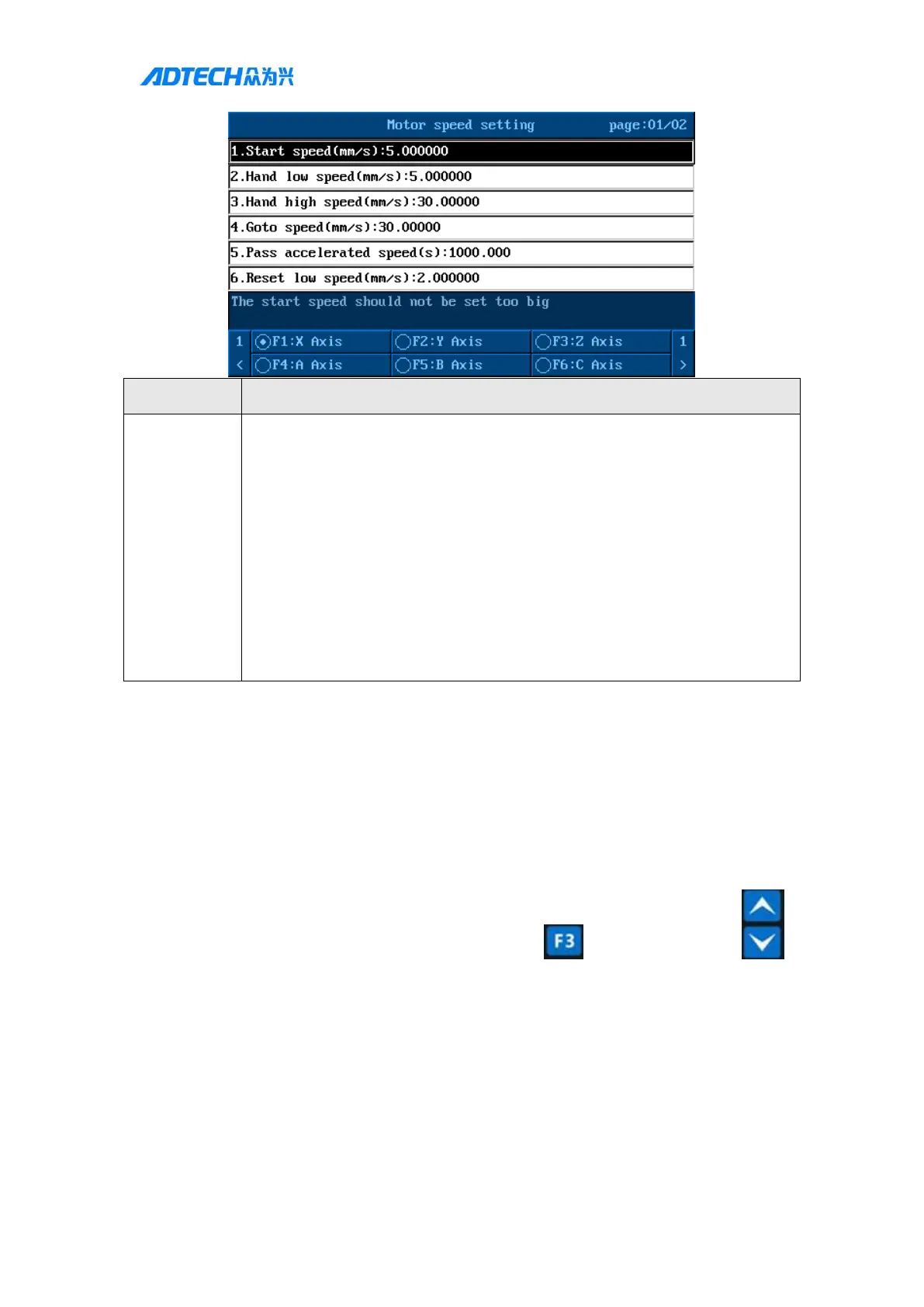
1) Starting speed: The starting speed of stepping motor should be less than 3
rev /sec, and the starting speed of servo motor should be less than 5 rev /sec
2) Manual low speed: Used for precise positioning during manual teaching
3) Manual high speed: Used for quick positioning during manual teaching
4) Positioning speed: The speed during motionpositioning
5) Acceleration: The larger the value, the faster the change from the starting
speed to the idle speed is. If it is set to 0, it is uniform
6) Reset low speed: Reset speed when approaching the machine origin
7) Reset high speed: Reset speed when moving away from the machine origin
8) Reset acceleration: The speed changes faster during reset. If set to 0, it is
uniform
1. ->In handheld box system parameter interface -> Press [ Standby parameters] ->