26 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 1 Create and Configure a Coordinate System
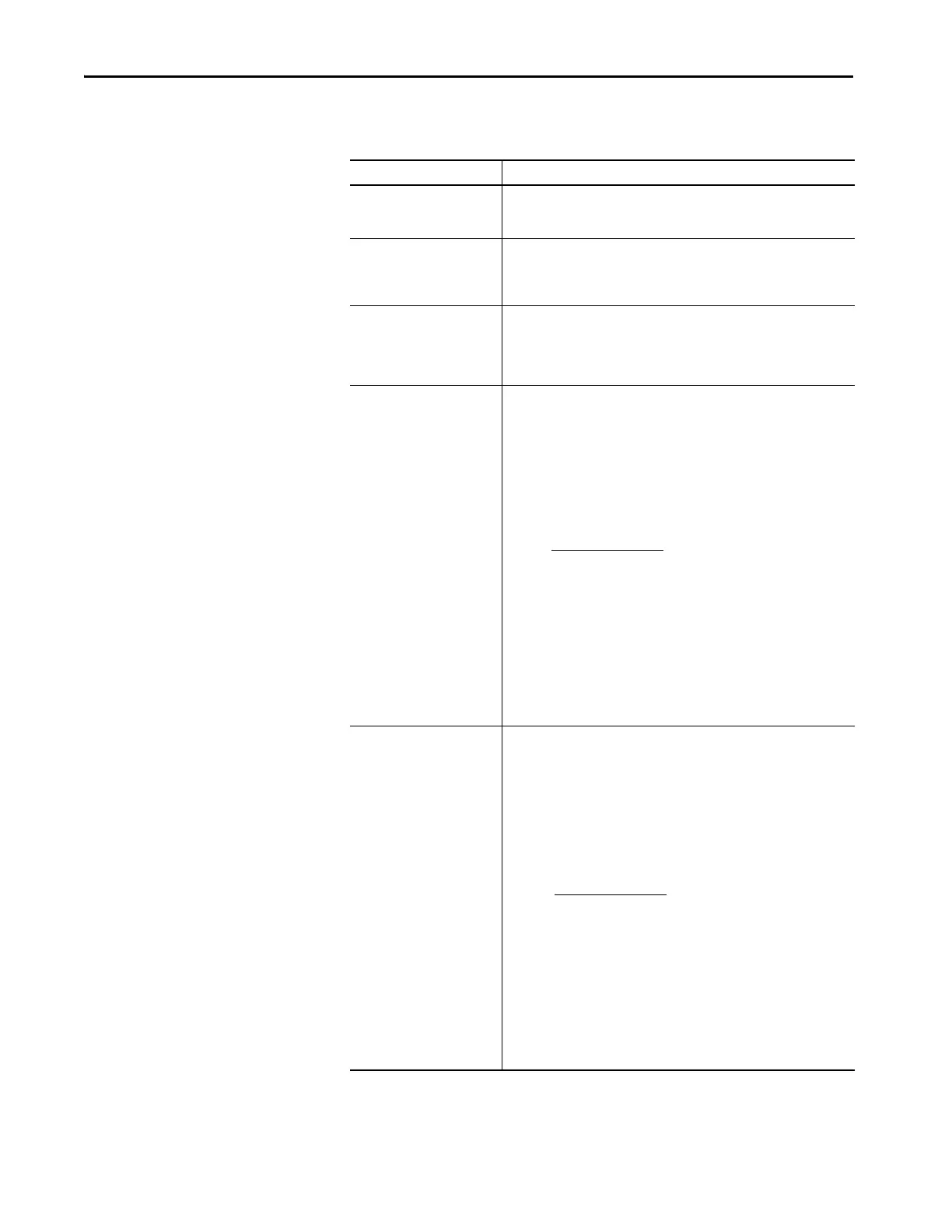
Table 6 - Dynamics Tab Field Descriptions
Item Description
Maximum Speed Enter the value for Maximum Speed to be used by the Coordinated Motion
instructions in calculating vector speed when speed is expressed as a percent of
maximum.
Maximum Acceleration Enter the value for Maximum Acceleration to be used by the Coordinated Motion
instructions. This value determines the acceleration rate to apply to the
coordinate system vector when acceleration is expressed as a percent of
maximum.
Maximum Deceleration Enter the value for Maximum Deceleration to be used by the Coordinated
Motion instructions to determine the deceleration rate to apply to the
coordinate system vector when deceleration is expressed as a percent of
maximum. The Maximum Deceleration value must be a nonzero value to
achieve any motion by using the coordinate system.
Maximum Acceleration Jerk The jerk parameters only apply to S-Curve profile moves by using these
instructions:
•MCS
•MCCD
•MCCM
•MCLM
The Maximum Acceleration Jerk rate of the coordinate system, in Coordination
Units/second
3
, defaults to 100% of the maximum acceleration time. The speed
and acceleration rate for this calculation are defined previously.
The Maximum Accel Jerk value that you enter is used when the motion
instruction is set with Jerk Units=% of Maximum. When a Multi-axis Motion
Instruction has Jerk Units=units per sec
3
, then the maximum acceleration jerk
value is derived from the motion instruction faceplate. The jerk units for the
motion instruction also allow for Jerk Units=% of Time, with 100% of Time. This
means that the entire S-Curve move has Jerk limiting. This is the default mode.
An S-Curve move with 0% of Time results in a trapezoidal profile and have 0%
Jerk limiting. If set manually, enter the value in units=Coordination Units/
second
3
units. You can also use the Calculate button to view this value in terms
of units=% of Time.
Maximum Deceleration Jerk The jerk parameters only apply to S-Curve profile moves by using these
instructions:
•MCS
•MCCD
•MCCM
•MCLM
The Maximum Deceleration Jerk rate of the coordinate system, in Coordination
Units/second
3
, defaults to 100% of the maximum deceleration time. The speed
and deceleration rate for the calculation are defined previously.
The Maximum Decel Jerk value that you enter is used when the motion
instruction is set with Jerk Units=% of Maximum. When a Multi-axis motion
instruction has Jerk Units=units per sec
3
, then the Max Deceleration Jerk value
is derived from the Motion Instruction faceplate. The jerk units for the motion
instruction also allow for Jerk Units=% of Time, with 100% of Time meaning
the entire S-Curve move has Jerk limiting, thus, the default mode. An S-Curve
move with 0% of Time results in a trapezoidal profile and has 0% Jerk limiting. If
set manually, enter the value in units=Coordination Units/second
3
units. You
can also use the optional Calculate button to view the value in terms of units=%
of Time.
MaxAccel
2
Speed
= Maximum Acceleration Jerk
MaxDecel
2
Speed
= Maximum Deceleration Jerk

 Loading...
Loading...





