98 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 5 Configure an Articulated Dependent Robot
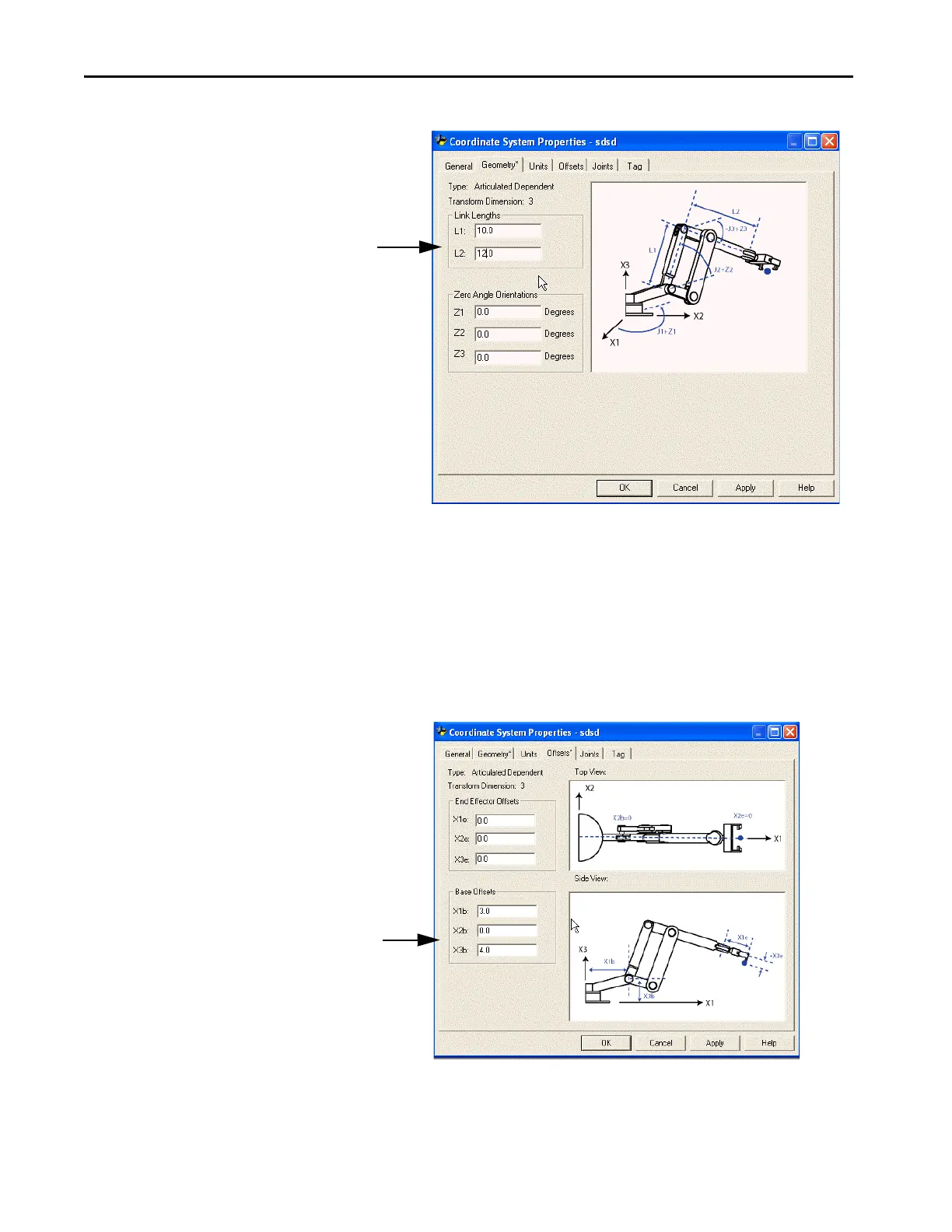
Figure 45 - Example of Link Lengths for an Articulated Dependent Robot
Base Offsets
The base offset is a set of coordinate values that redefines the origin of the
robot. The correct base-offset values are typically available from the robot
manufacturer. Enter the values for the base offsets in the X1b and X3b fields of
the Coordinate System Properties dialog.
Figure 46 - Example of Base Offsets for an Articulated Independent Robot
Enter the Link Length values.
For the robot shown in our example, the Link Length values
are:
• L1 = 10.0
• L2 = 12.0
Enter the Base Offset values.
For the robot shown in our example, the Base Offset
values are:
• X1b = 3.0
• X3b = 4.0

 Loading...
Loading...





