88 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
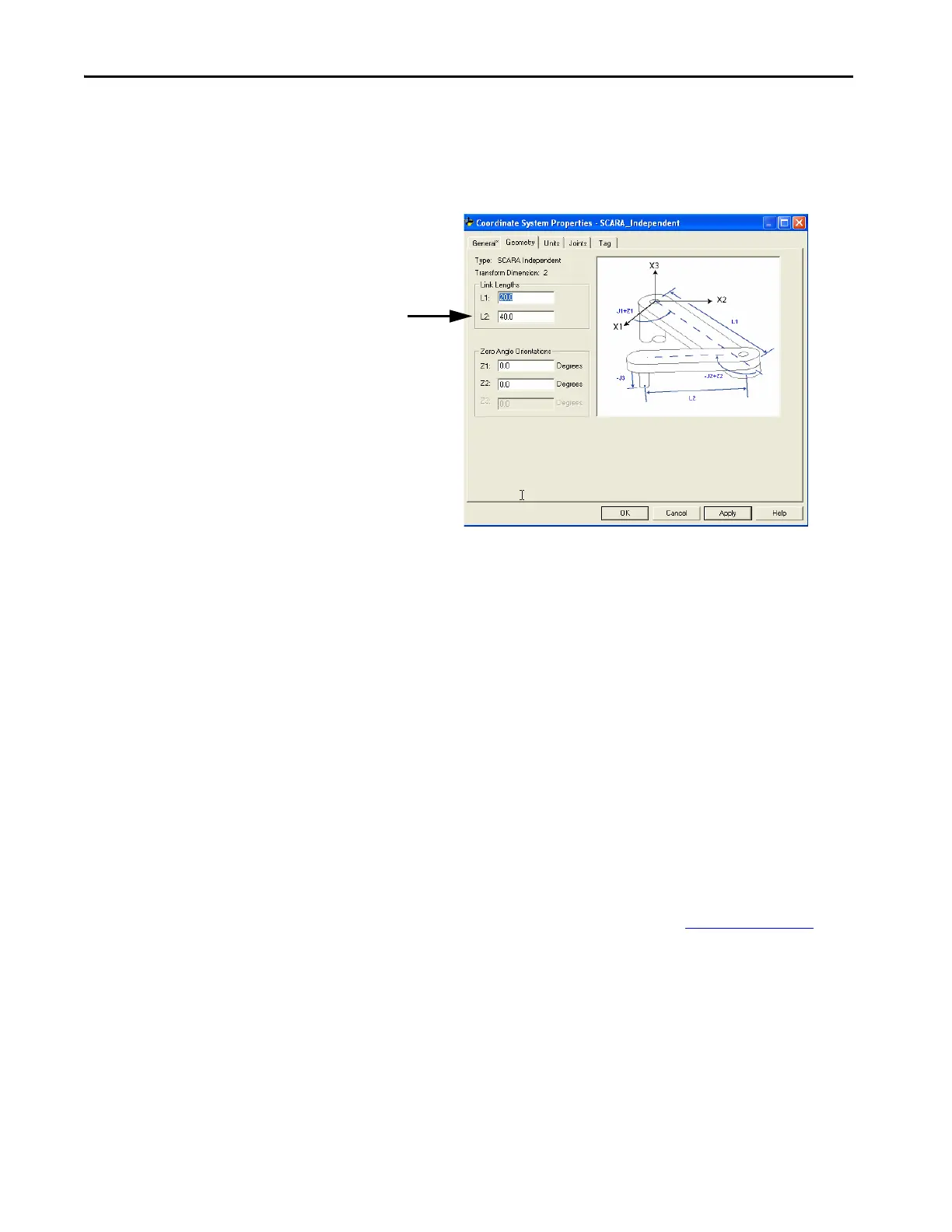
Link Lengths
Link lengths are the rigid mechanical bodies attached at joints.
Figure 39 - Configuring Link Lengths for a SCARA Independent Robot
Base offsets and end-effector offsets do not apply to a SCARA Independent
robot configuration.
Error Conditions
Kinematics error conditions are detected:
• upon activation of a transformation by executing an MCT instruction.
• in some movement conditions.
Errors can occur for certain movement conditions for either the source
or target coordinate system after a transformation has been established.
These types of errors are reported in the MCT instruction error codes.
Singularity and other movement error conditions are also reported in
the MCT error codes.
• computing an invalid position via an MCTP instruction.
For more information about error codes, see the Logix5000 Controllers
Motion Instructions Reference Manual, publication MOTION-RM002
.
Enter the Link Length values.
For the robot shown in SCARA Independent above,
the Link Length values are:
• L1 = 20
• L2 = 40

 Loading...
Loading...





