86 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
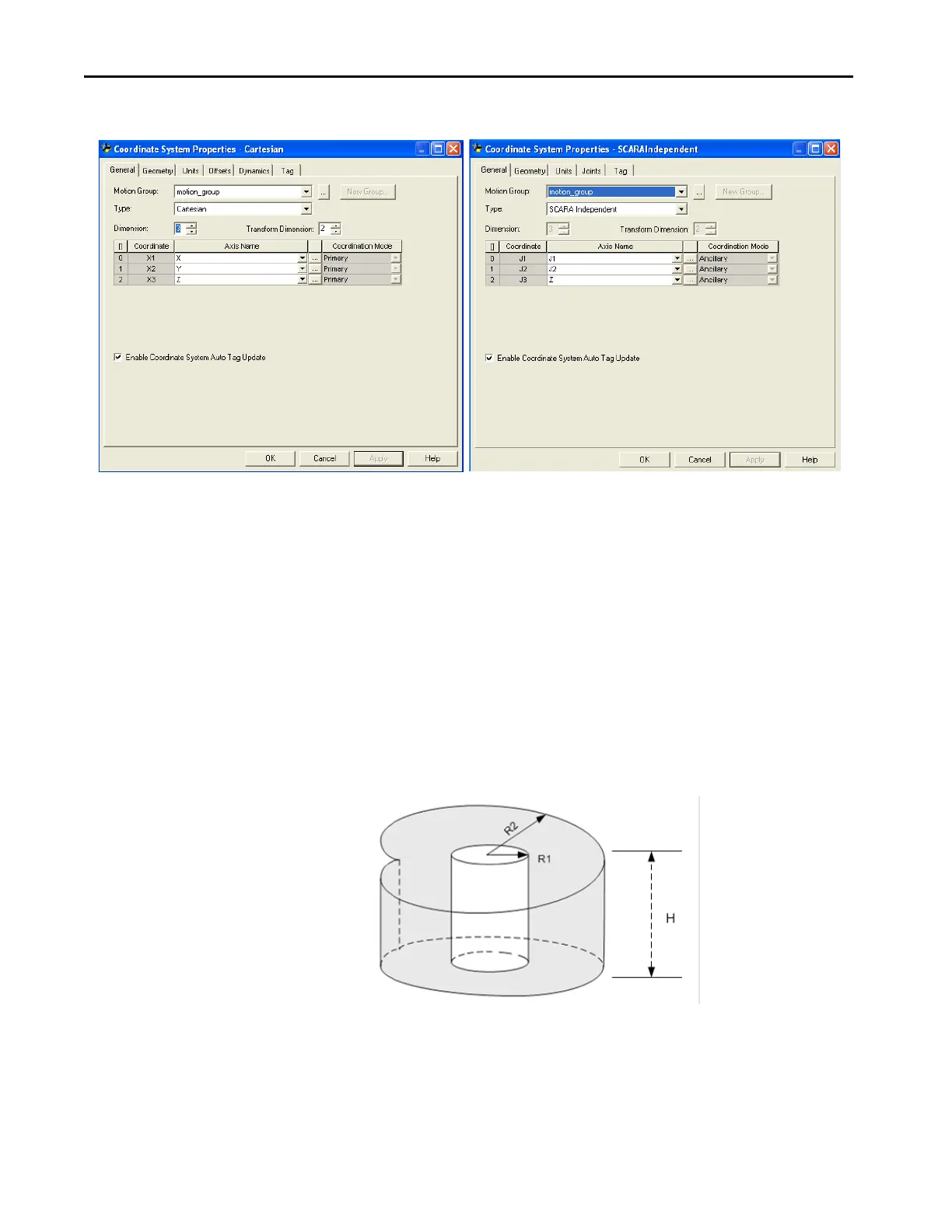
Figure 36 - Example Source and Target Coordinate Systems for a SCARA Independent Robot
Identify the Work Envelope for a SCARA Independent Robot
The work envelope is the three-dimensional region of space that defines the
reaching boundaries for the robot arm. The work envelope for the SCARA
Independent robot is a hollow cylinder with:
• a height equal to the travel limit of the J3 axis.
• an inner radius (R1) equal to |L1-L2|.
• an outer radius (R2) equal to |L1+L2|.
Figure 37 - Example Work Envelope for a SCARA Independent Robot
Source Coordinate System Configuration
Target Coordinate System Configuration

 Loading...
Loading...





