36 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 2 Configure a Cartesian Coordinate System
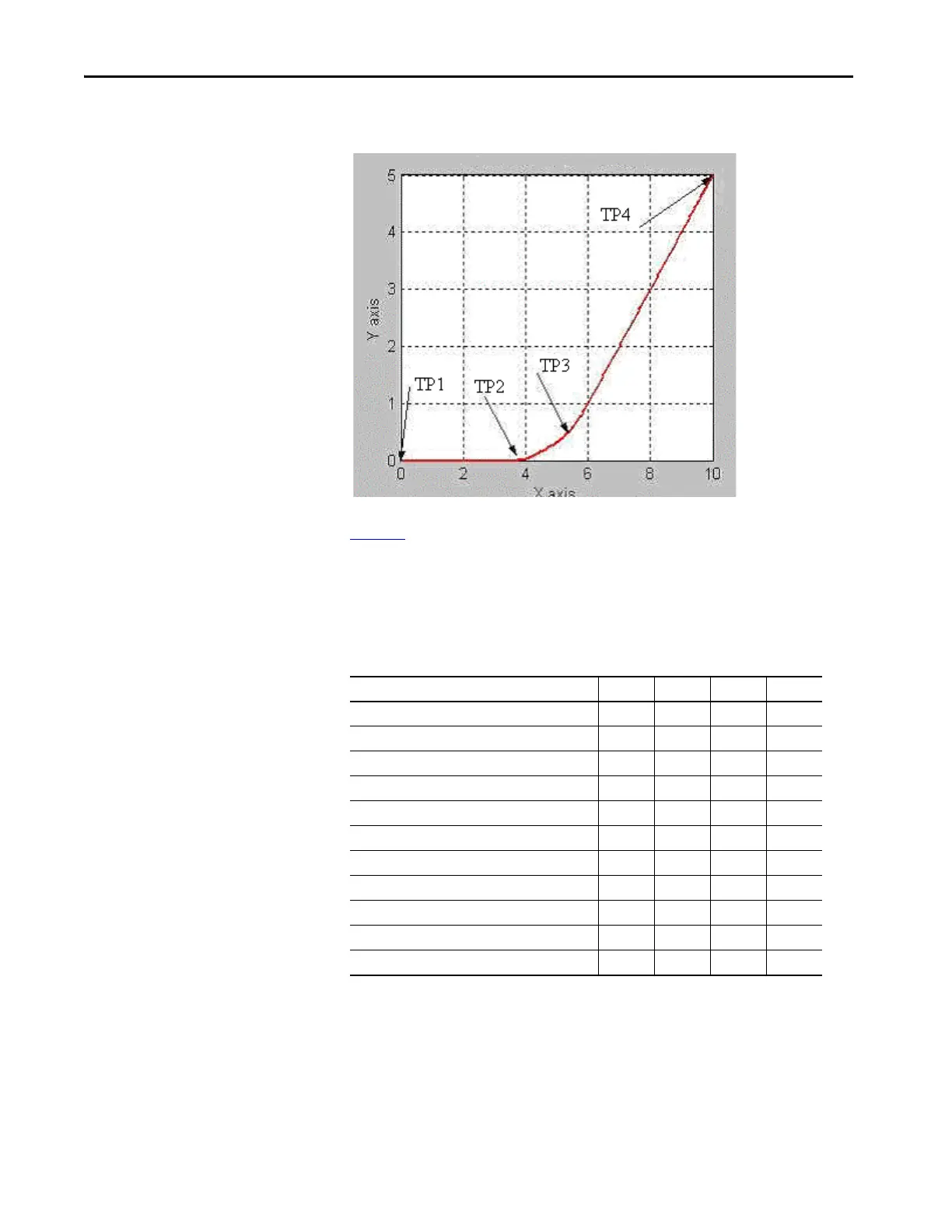
Bit States at Transition Points of Blended Move by Using No Decel
Tab le 1 1 shows the bit status at the various transition points shown in the
preceding graph with termination type of No Decel. For No Decel termination
type, distance-to-go for transition point TP2 is equal to deceleration distance
for the Move1 instruction. If Move 1 and Move 2 are collinear, then Move1.PC
is true at TP3 (the programmed end point of first move).
Table 11 - Bit Status with No Decel Termination Type
Bit TP1 TP2 TP3 TP4
Move1.DN TTTT
Move1.IP T F F F
Move1.AC T F F F
Move1.PC F T T T
Move2.DN TTTT
Move2.IP TTTF
Move2.AC F T T F
Move2.PC FFFT
cs1.MoveTransitionStatus F T F F
cs1.MovePendingStatus T F F F
cs1.MovePendingQueueFullStatus T F F F

 Loading...
Loading...





