44 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 2 Configure a Cartesian Coordinate System
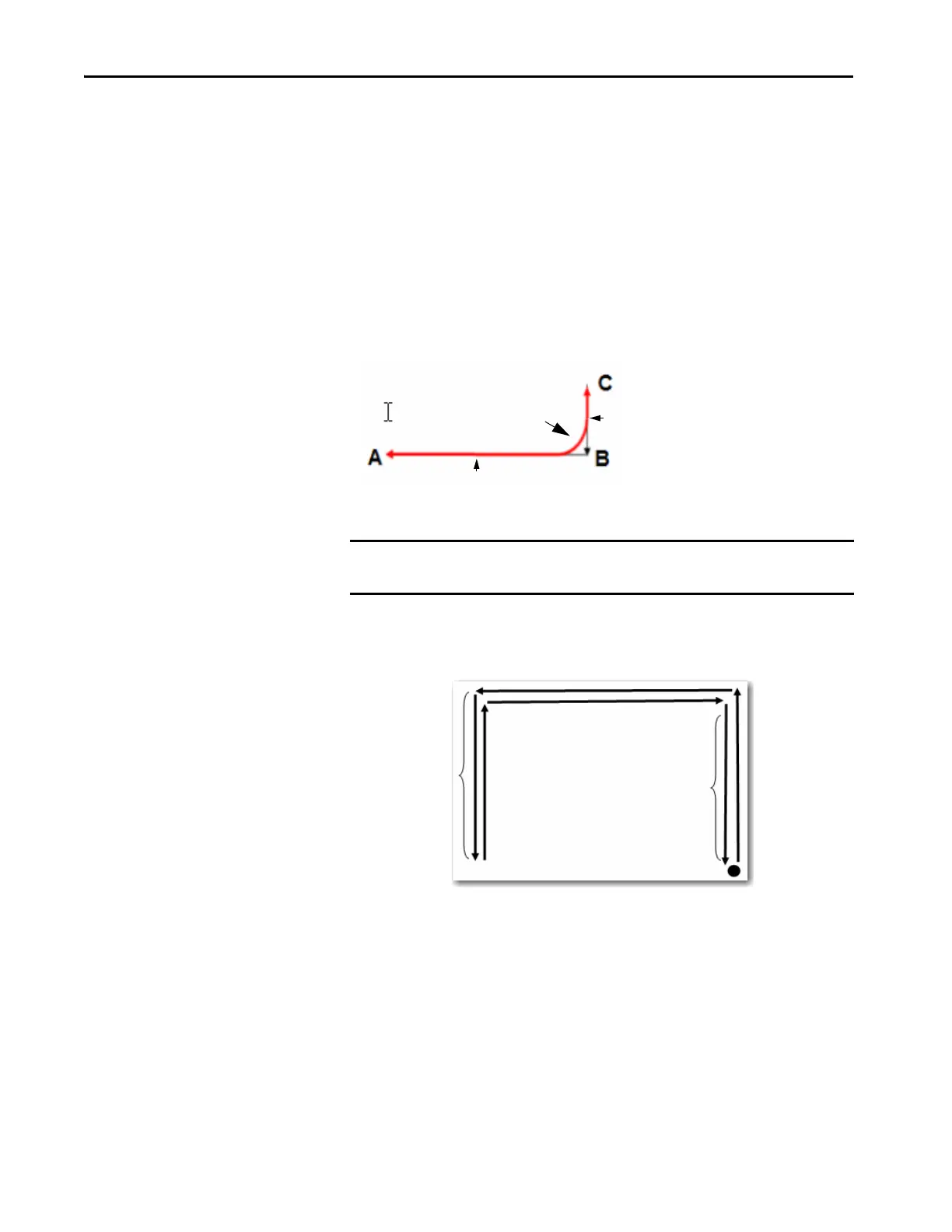
Figure 8 - Example of a Symmetric Profile
To make sure that your trajectory is symmetric, you must terminate any
sequence of moves by either Termination Types 0 or 1. Use a Termination Type
of 0 or 1 at the Reversal Point of a profile that moves back on itself.
Using a TT2, TT3, TT4, TT5 or TT6 as the last move in a profile (or the
reversal point) is safe. However, the resulting trajectory from A to B cannot
always be the same as that from B to A. Explicit termination of the sequence of
moves helps the controller to optimize the velocity profile, reduce the CPU
load, and make sure of a symmetric profile.
• MCLM 2 (point B to point C) follows MCLM 1 (point A to point B).
• MCLM 4 (point B to point A) follows MCLM 3 (point C to point B).
• The acceleration of MCLM 1 must be equal to the deceleration of MCLM 4.
• The deceleration of MCLM 1 must be equal to the acceleration of MCLM 4.
• The acceleration of MCLM 2 must be equal to the deceleration of MCLM 3.
• The deceleration of MCLM 2 must be equal to the acceleration of MCLM 3.
MCLM1, MCLM 4
Blended Trajectory
from A to B and from B to C
MCLM 2, MCLM 3
MCLM 1 (Pos = [2,0], Accel = 1, Decel = 2)
MCLM 2 (Pos = [2,1], Accel = 3, Decel = 4)
MCLM 3 (Pos = [2,0], Accel = 4, Decel = 3)
MCLM 4 (Pos = [0,0], Accel = 2, Decel = 1)
IMPORTANT We recommend that you terminate any sequence of moves by either
Termination Type 0 or 1, that is, TT0 or TT1.
This move must be
TT0 or TT1.
This move must be
TT0 or TT1.
Reversal Point

 Loading...
Loading...





