68 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
Homing or moving a joint axis to a position beyond a computed joint limit and
then invoking a MCT instruction, results in an error 67 (Invalid Transform
position). For more information regarding error codes, see the Logix5000™
Controllers Motion Instructions Reference Manual,
publication MOTION-RM002
.
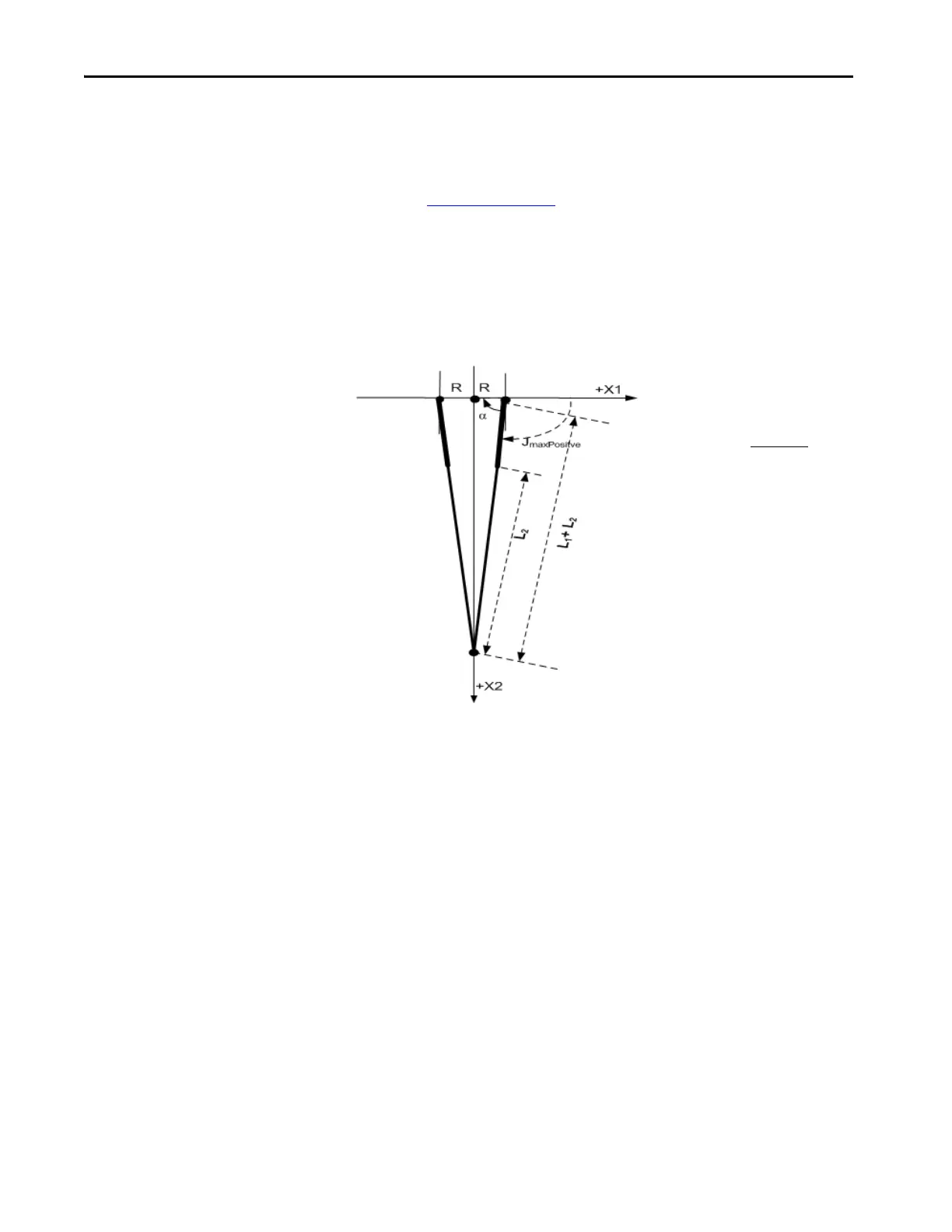
Maximum Positive Joint Limit Condition
The derivations for the maximum positive joint apply to the condition when
L1 and L2 are collinear.
Figure 21 - Maximum Positive Joint Limit Condition - L1 and L2 are Collinear
Maximum Positive Joint Limit Position
R = absolute value of (X1b - X1e)
cos
-1
α =
Jmax Positive = 180
α
(
)
L1 + L2
R

 Loading...
Loading...





