70 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
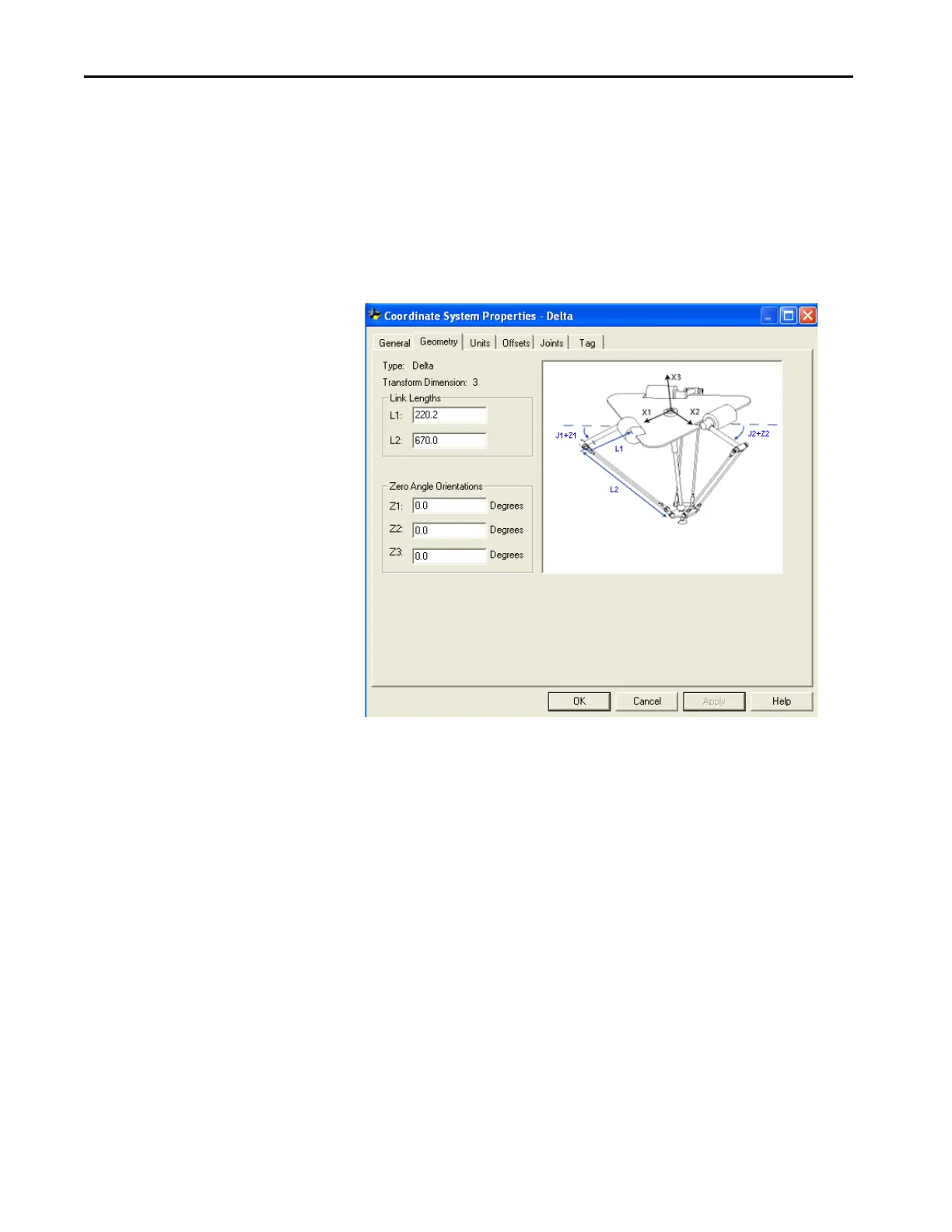
Link Lengths
Link lengths are the rigid mechanical bodies attached at the rotational joints.
The three-dimensional Delta robot geometry has three link pairs each made up
of L1 and L2. Each of the link pairs has the same dimensions.
• L1 - is the link attached to each actuated joint (J1, J2, and J3).
• L2 - is the parallel bar assembly attached to L1.
Figure 23 - Three-dimensional Delta Robot - Link Lengths Configuration Screen
Base Offsets
There is one base offset value (X1b) available for the three-dimensional Delta
robot geometry. Enter the value equal to the distance from the origin of the
robot coordinate system to one of the actuator joints.

 Loading...
Loading...





