280 Rockwell Automation Publication 2198-UM002G-EN-P - February 2019
Chapter 7 Troubleshoot the Kinetix 5700 Drive System
Axis Troubleshooting
These conditions do not always result in a fault code, but can require
troubleshooting to improve servo drive performance. See the iTRAK System
User Manual, publication 2198T-UM001
for general iTRAK troubleshooting.
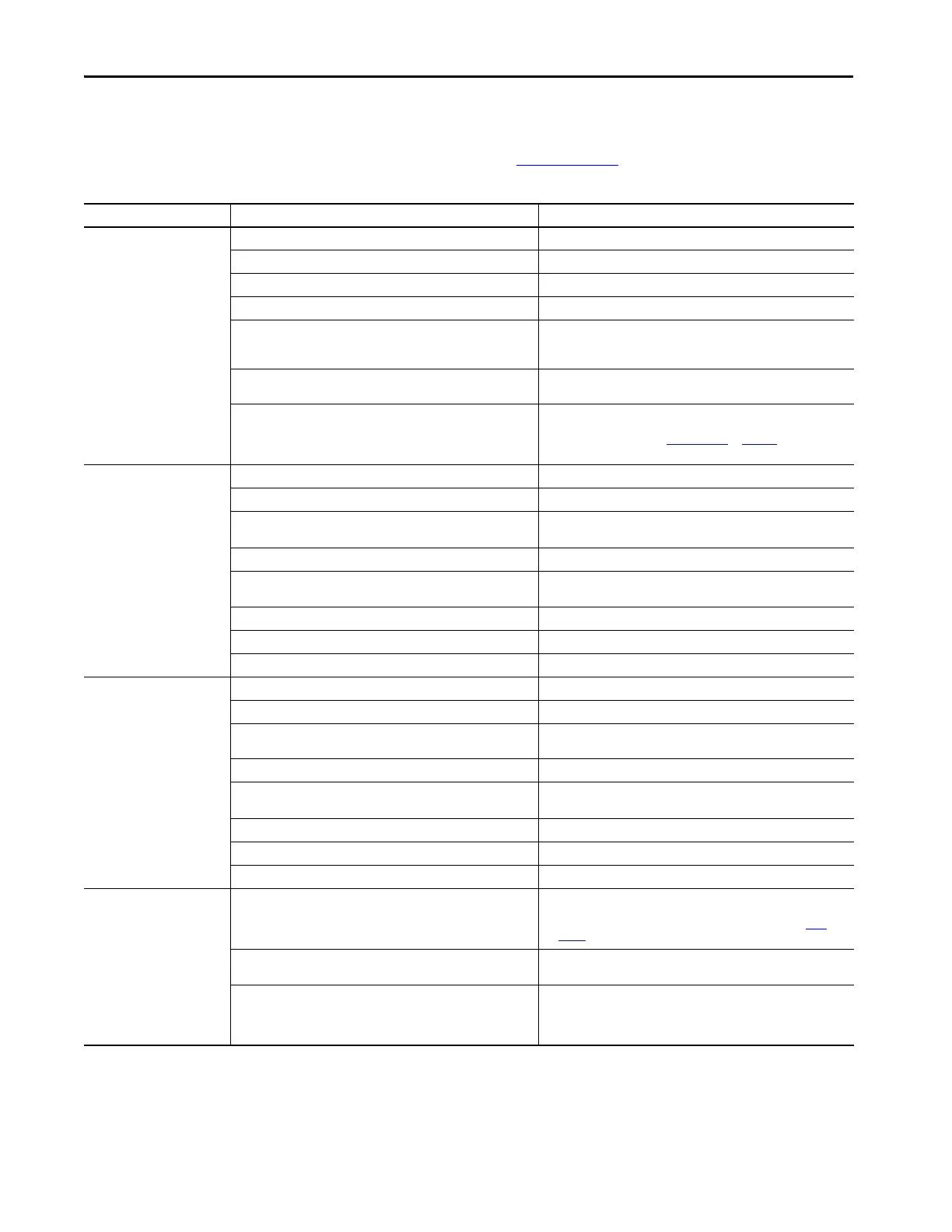
Table 129 - Axis Troubleshooting
Condition Potential Cause Possible Resolution
Axis or system is unstable.
The position feedback device is incorrect or open. Check wiring.
Unintentionally in Torque mode. Check to see what primary operation mode was programmed.
Motor tuning limits are set too high. Run Tune in the Logix Designer application.
Position loop gain or position controller accel/decel rate is improperly set. Run Tune in the Logix Designer application.
Improper grounding or shielding techniques are causing noise to be
transmitted into the position feedback or velocity command lines, causing
erratic axis movement.
Check wiring and ground.
Motor Select limit is incorrectly set (servo motor is not matched to axis
module).
•Check setups.
• Run Tune in the Logix Designer application.
Mechanical resonance.
• Notch filter or output filter can be required (refer to Axis Properties dialog
box, Compliance tab in the Logix Designer application).
• Enable adaptive tuning. See Adaptive Tuning
on page 445 for more notch
filter information.
You cannot obtain the motor
acceleration/deceleration that you
want.
Torque Limit limits are set too low. Verify that torque limits are set properly.
Incorrect motor selected in configuration. Select the correct motor and run Tune in the Logix Designer application again.
The system inertia is excessive.
• Check motor size versus application need.
• Review servo system sizing.
The system friction torque is excessive. Check motor size versus application need.
Available current is insufficient to supply the correct accel/decel rate.
• Check motor size versus application need.
• Review servo system sizing.
Acceleration limit is incorrect. Verify limit settings and correct them, as necessary.
Velocity Limit limits are incorrect. Verify limit settings and correct them, as necessary.
The motor is operating in the field-weakening range of operation. Reduce the commanded acceleration or deceleration.
Motor does not respond to a
command.
The axis cannot be enabled until stopping time has expired. Disable the axis, wait the configured stopping time, and enable the axis.
The motor wiring is open. Check the wiring.
The motor cable shield connection is improper.
• Check feedback connections.
•Check cable shield connections.
The motor has malfunctioned. Repair or replace the motor.
The coupling between motor and machine has broken (for example, the
motor moves, but the load/machine does not).
Check and correct the mechanics.
Primary operation mode is set incorrectly. Check to see what primary operation mode was programmed.
Velocity or torque limits are set incorrectly. Check and properly set the limits.
Brake connector not wired Check brake wiring
Presence of noise on command or
motor feedback signal wires.
Recommended grounding per installation instructions have not been
followed.
• Verify grounding.
• Route wire away from noise sources.
• Refer to System Design for Control of Electrical Noise, publication GMC-
RM001.
Line frequency can be present.
• Verify grounding.
• Route wire away from noise sources.
Variable frequency can be velocity feedback ripple or a disturbance caused by
gear teeth or ballscrew, and so forth. The frequency can be a multiple of the
motor power transmission components or ballscrew speeds resulting in
velocity disturbance.
• Decouple the motor for verification.
• Check and improve mechanical performance, for example, the gearbox or
ballscrew mechanism.
 Loading...
Loading...








