Rockwell Automation Publication 2198-UM002G-EN-P - February 2019 321
Kinetix 5700 Safe Torque-off Function Chapter 9
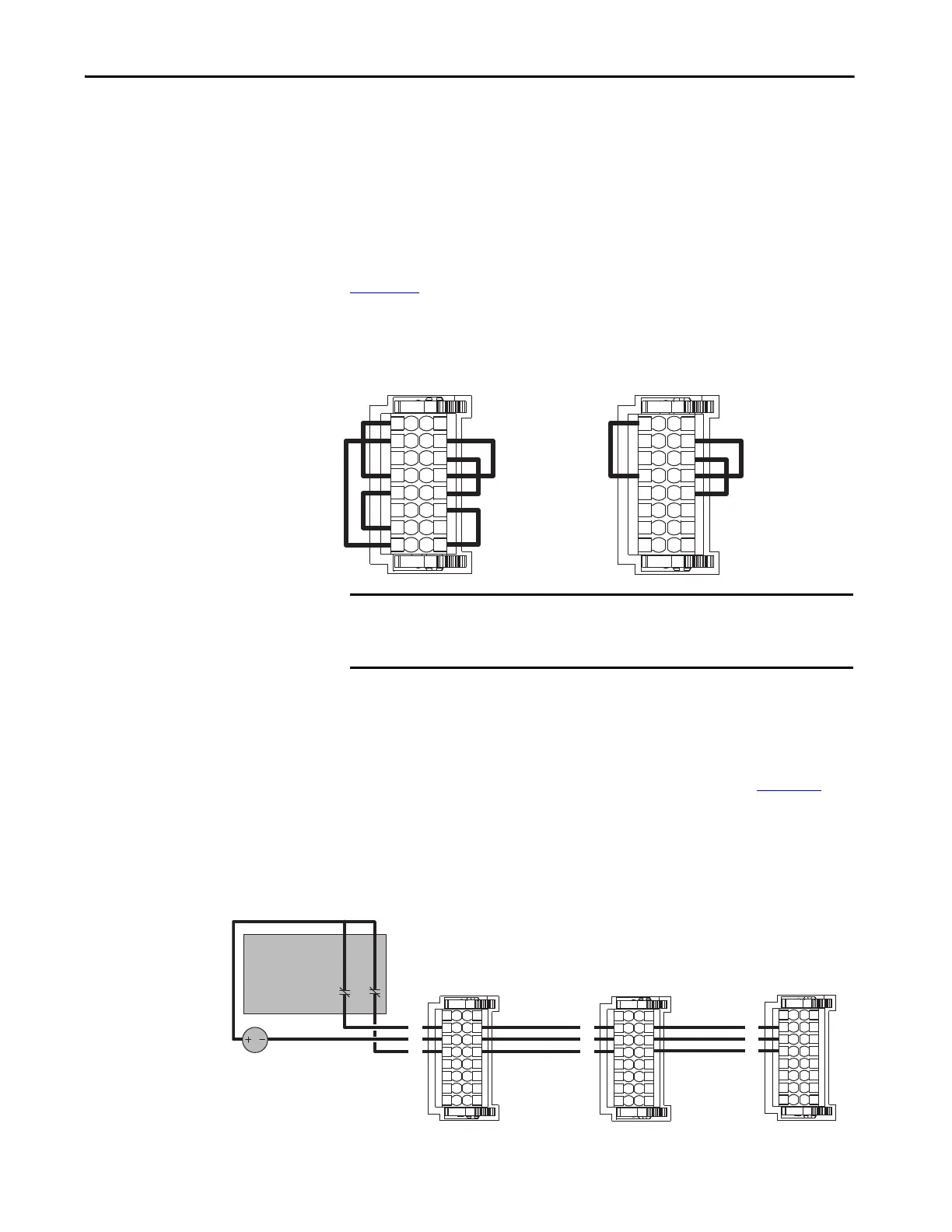
Safe Torque-off Feature Bypass
The Kinetix 5700 inverters do not operate without a safety circuit or safety
bypass wiring. For applications that do not require the safe torque-off feature
you must install jumper wires to bypass the safe torque-off circuitry.
Kinetix 5700 inverters ship with a 16-pin wiring plug for wiring to safety
devices. To bypass the safety function, wire these signals as shown in
Figure 149
. With the jumper wires installed, the safe-off feature is not used.
Figure 149 - Safe Torque-off Bypass Wiring
Cascade the Safe Torque-off Signal
The total number of drives in a single cascaded safety circuit is limited by the
current carrying capacity of the cascaded safety wiring. Refer to Table 161
for
current rating per channel, per drive.
In this example, the cascaded safe torque-off (STO) wiring is for an application
with three single-axis inverters and a single safety device.
Figure 150 - Cascaded STO Wiring - Single-axis Inverters
SB+/NC
S1A
SCA
S2A
SB-
S1B
SCB
S2B
SB+/NC
S1A
SCA
S2A
SB-
N/C
N/C
N/C
1
2
12
3
4
5
6
7
8
9
10
11
13
14
15
16
1
2
12
3
4
5
6
7
8
9
10
11
13
14
15
16
2198-Dxxx-ERSx
Dual-axis Inverter
Safety (STO) Connector Plug
2198-Sxxx-ERSx
Single-axis Inverter
Safety (STO) Connector Plug
IMPORTANT If the safe torque-off function is not required, the drive safety
configuration must be returned to Hardwired STO mode and the bypass
jumper wires applied to the safety (STO) connector plugs.
SB+/NC
S1A
SCA
S2A
SB-
N/C
N/C
N/C
SB+/NC
S1A
SCA
S2A
SB-
N/C
N/C
N/C
24V DC
SB+/NC
S1A
SCA
S2A
SB-
N/C
N/C
N/C
1
2
12
3
4
5
6
7
8
9
10
11
13
14
15
16
1
2
12
3
4
5
6
7
8
9
10
11
13
14
15
16
1
2
12
3
4
5
6
7
8
9
10
11
13
14
15
16
First Drive
Middle Drive
Last Drive
Dual-channel
Equivalent
Safety Device
 Loading...
Loading...








