Chapter III Display & Operation
45
3-internal speed control; 4-speed trial operation; 5-JOG trial operation; 6-factory mode.
3. The pulse frequency of the position command is the actual one which has not yet
been amplified through the electric gear. The minimum unit of the pulse frequency is
0.1 kHz, and it is positive in the forward direction and negative in the reverse direction.
4. The absolute position of the rotor in one revolution refers to its relative position with
that of the stator. One revolution is regarded as a cycle which ranges from 0 to 9999.
5. As for the alarm, “Er.” means everything is under control without any alarm. Other
figures or letter groups indicate a certain kind of fault. Refer to Chapter 7 for fault
information.
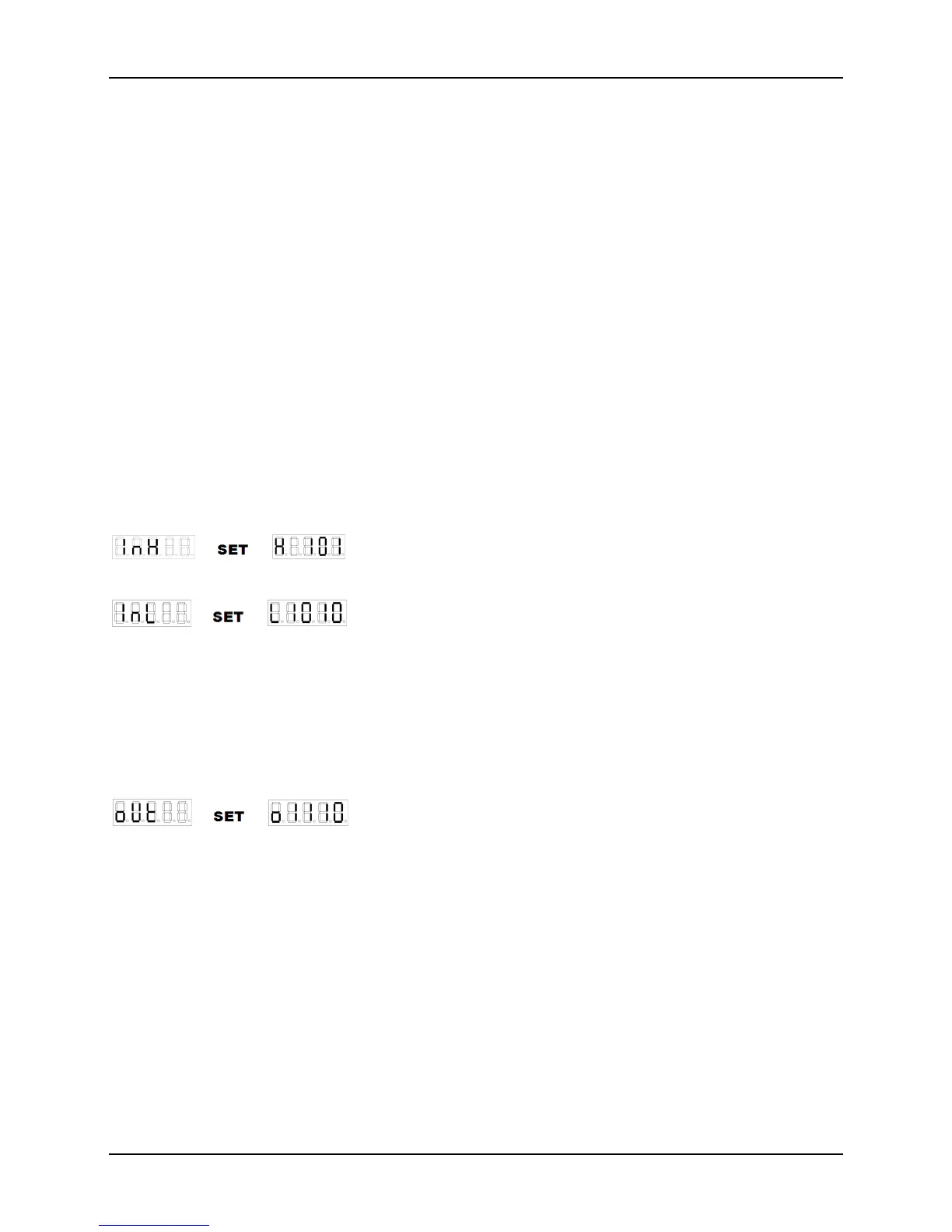
6. Display of terminal on-off input state:
The external control terminal involves 7 on-off inputs, which are displayed by inH (3
MSBs DI7~DI5) and by inL (4 LSBs DI4~DI1). From the high order to the low order,
4 LSBs LED indicates the input state, 1 indicates no input, and 0 indicates input. (Input
means there is current input into optocoupler)
Display:
→ → indicates input in D16, and no input in D17 and D15. (0 at
the high order will not be displayed)
→ → indicates input in D13 and D11, and no input in D14 and
D12.
7. Display of terminal on-off output state:
The terminal involves 4 on-off outputs, the state of which are displayed by out from the
high order and the low order, 1 indicates output, and 0 indicates no output.
Display:
→ → indicates output in DO4, DO3, and DO4, and no output in
DO1.
(Output means OC is outputting breakover)
8. The displayed speed is in (rpm).
9. The displayed current is in (A).
10. The displayed torque is in a percentage of the rated torque of the motor (%).
11. The drive model is displayed as a digit.
12. The software version is displayed as V plus three digits behind.
13. The motor model is displayed as a letter (S or E) plus 1 or 2 digits behind.
 Loading...
Loading...