drift, and the motor is operated at low speed. If necessary,
adjust the analog zero compensation value (P03.12) to make
the motor stop running.
Operate the host control signal, set appropriate speed
instruction to the servo drive, so the motor is operated
according to instruction. Observe the motor rotation direction
and speed, and determine whether the motor operation is in
line with the expectation.
4.3 Adjustment
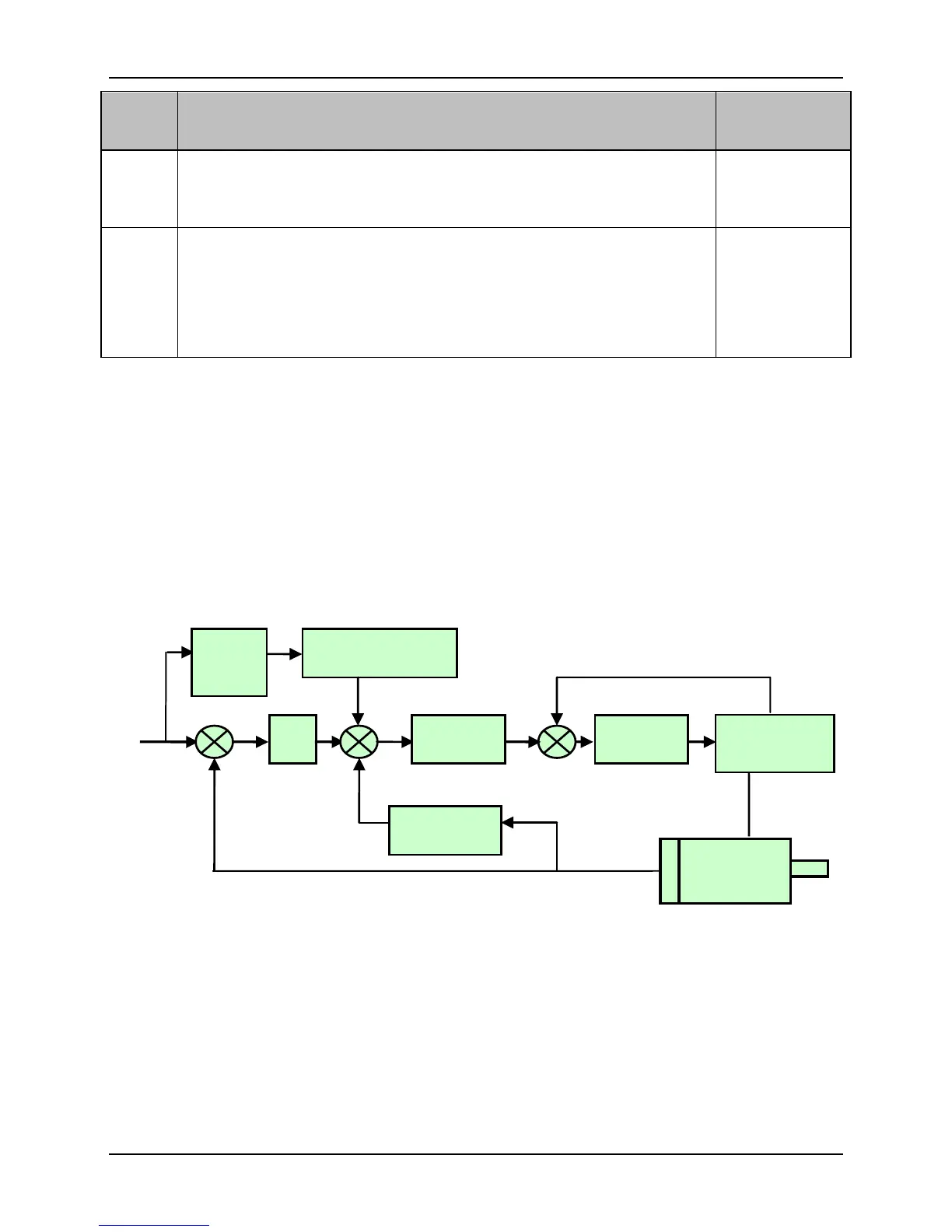
The servo system has three closed loop controls, they are position loop, speed loop and
current loop (or torque loop) from outside to inside. The current loop is related to motor
parameters, the drive has allocated the best current loop parameters for the matching
motor, so the user do not need to adjust relevant parameters.. The speed loop and
position loop parameters shall be adjusted according to the load condition.
Note: Wrong parameter setting may result in equipment failure and accidents, the
correctness of parameter shall be confirmed before start up. It is recommended to
perform empty load testing, and then perform load testing.
 Loading...
Loading...