p 19/58
Technical Manual NAM-BL4x-MT-EN-C
The information in this document is the property of Automatic Systems and is confidential. The consignee withholds from using it for anything other than the use of the products or the execution of the
project to which they belong and withholds from communicating it to third parties without prior written agreement from Automatic Systems. Document subject to change without prior notice.
3.2. QUICK START menu: Quick configuration
This menu reviews the parameters that have to be configured before the equipment may be used.
Parameter Values Description
PS1 Function 0 (by default) to 7
Definition of the mode of operation of Presence
Sensor 1: see table below.
PS 2 Function: 0 (by default) to 7
Definition of the mode of operation of Presence
Sensor 2: see table below.
By default, the presence sensors are deactivated.
Therefore, in order to ensure that their safety functions are operational, it is
indispensable that the parameters for each of the presence sensors used be set.
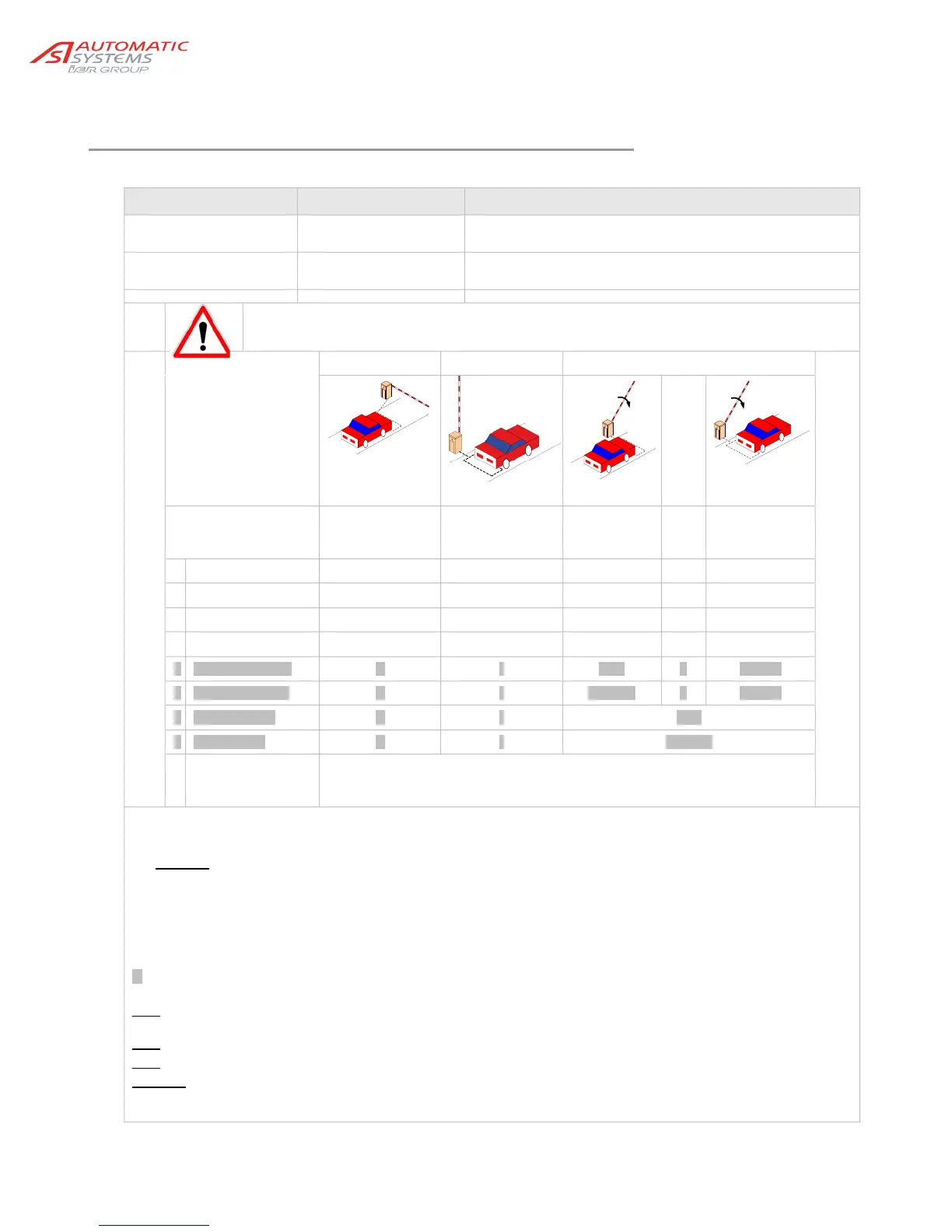
closed obstacle
open obstacle Closing obstacle
Sensor function
Action upon
arrival in the
sensor’s field
Action upon
leaving the
sensor’s field
Action upon
arrival in the
sensor’s field
+
Action upon
leaving the
sensor’s field
0 Deactivated
** - -
1 Opening
Opening** Closing* Opening + Closing*
2 CL_Stop+CL
** Closing*** Stop + Closing
3 CL_OP+CL
** Closing*** Opening + Closing
4 Nothin_Stop+CL ** - Stop + Closing
5 Nothing_OP+CL ** - Opening + Closing
6 Nothing_Stop ** - Stop
7 Nothing_OP ** - Opening
Incompatible
This message is displayed for 1 second if the selected operating mode for the sensor
is not compatible with the exploitation mode (parameter below). See the table of
incompatible modes here under.
*: Automatic closure only if the preceding opening was initiated by detection and not if presence is detected by another sensor.
Notably, if there is a power outage when the obstacle is open, the obstacle will not close automatically when the power is
brought back (a close command must be executed).
Warning:
The presence sensor operating in Open mode may not be placed under the arm, because it is it is not secured, in
contrast to the other modes: a Lock Close command has priority for it (see the Exploitation parameter below) and could cause
the arm to close on a vehicle.
**: Opening is possible using the commands present on the control board's connector blocks: open command, reader command,
and Lock Open command.
***: If passage is detected while the obstacle is Locked Open, closure will take place when the Lock Open command is
deactivated.
: With regard to the underlined values, a close command must be executed to close the obstacle when it is open. The safety
function is only activated during the closing movement of the obstacle.
Note
: the installation of 2 loops on PS1 and PS2 requires the use of a double detector since PS1 and PS2 are on the same
connector.
Note
: 2 supplementary Presence Sensor functions (PS3 and PS4) are available through extended menu SENSOR FUNCTION.
Note
: the sensor status (1/0) is always available (for each function mode) through extended menu OUTPUT FUNCTION.
Warning:
When the power is turned on, the detectors (DP) measure the state of the loops and initialize the reference level with
regard to their environment. Hence, if a vehicle is present on the loop during activation, it will not be detected and the loop will give
the order to close (in modes 1, 2 and 3 only)!