MN1957 Input / Output 4-9
www.baldormotion.com
4.3.1.4 Auxiliary encoder inputs - DIN17 (STEP), DIN18 (DIR), DIN19 (Z)
DIN17-DIN19 may also be used as an auxiliary encoder input. DIN17 accepts step (pulse)
signals and DIN18 accepts direction signals, allowing an external source to provide the
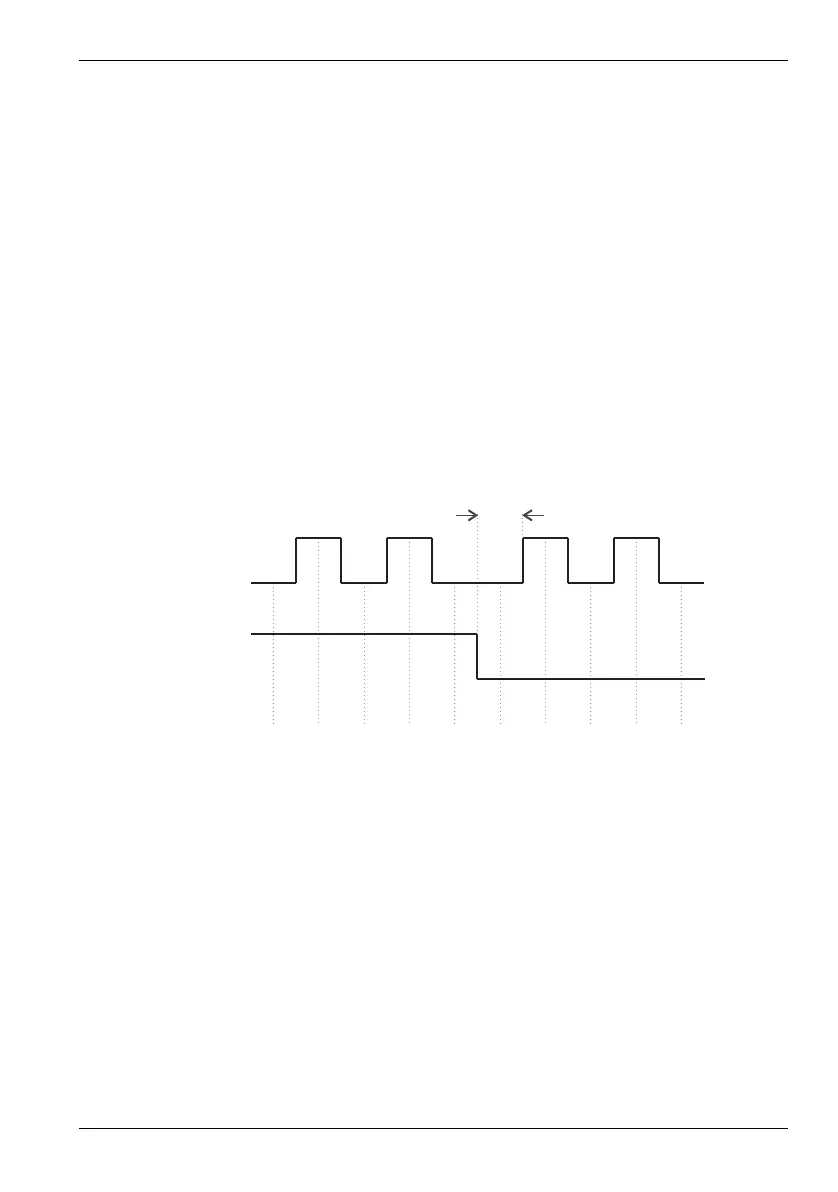
reference for the speed and direction of an axis. The step frequency (15 kHz maximum)
determines the speed, and the direction input determines the direction of motion. Both the
rising and falling edges of the signal on DIN17 cause an internal counter to be changed; see
Figure 11. If 5 V is applied to DIN18 (or it is left unconnected) the counter will increment. If
DIN18 is grounded the counter will be decremented. A minimum period of 500 µs is required
between transitions on the direction and step input to guarantee the change of direction has
been recognized.
Typically, one channel of an encoder signal (either A or B) is used to provide the step signal
on DIN17, allowing the input to be used as an auxiliary (master) encoder input. The input can
be used as a master position reference for cam, fly and follow move types. For this, the
MASTERSOURCE keyword must be used to configure the step input as a master (auxiliary)
encoder input. The master position reference can then be read with the AUXENCODER
keyword (using 0 as the channel parameter). Since a secondary encoder channel is not
used, DIN18 allows the direction of motion to be determined. The Z signal on DIN19 can be
supplied from the encoder's index signal, and may be read using the AUXENCODERZLATCH
keyword. See the Mint help file for details of each AUXENCODER... keyword.
Figure 11: Auxiliary encoder input 0 (DIN17/18) - edge counting
Note that encoder input ENC 4 forms another auxiliary encoder input, using normal
incremental encoder connections A, B and Z. This supports a higher frequency input and
additional functionality - see section 4.4.3.
0 0
1122
33
44
Count returned by
AUXENCODER(0)
DIN17 (STEP)
500 µs min.
DIN18 (DIR)
Servo Systems Co. • 115 Main Road • P.O. Box 97 • Montville, NJ,
07045-0097 • (973) 335-1007 • Toll Free: (800) 922-1103
Fax: (973) 335-1661 • www.servosystems.com