BTL5-A/C/E/G1_-M/U_ _ _ _-K-SR 32/K_ _
Capteur de déplacement Micropulse – Forme à tige
3
français
2.1 Propriétés
Les capteurs de déplacement
Micropulse se distinguent par :
– une résolution, reproductibilité et
linéarité très élevées
– pas d’usure ni d’entretien
– une insensibilité aux secousses,
aux vibrations, à la poussière et
aux perturbations
– un signal de sortie absolu
– une résistance à la pression jus-
qu’à 600 bar
– un indice de protection selon
CEI 529 :
modèle avec connecteur : IP 67
modèle avec câble : IP 68
(5 bar / 48 h)
2.2 Mode de fonctionnement
Le capteur de déplacement
Micropulse contient le guide d’on-
des tubulaire, protégé par un tube
en acier spécial. Un capteur de
position, relié à la pièce de machine
par l’utilisateur et dont la position
doit être déterminée, est déplacé le
long du guide d’ondes.
Le capteur de position détermine la
position à mesurer sur le guide
d’ondes. Une impulsion initiale gé-
nérée en interne déclenche, con-
jointement avec le champ magnéti-
que du capteur de position, une
onde de torsion dans le guide d’on-
des, qui se forme par magnétostric-
tion et se propage à une vitesse
ultrasonique.
L’onde de torsion qui se propage à
l’extrémité du guide d’ondes est
absorbée dans la zone d’amortisse-
ment. Celle qui se propage au dé-
but de la distance mesurée génère
un signal électrique dans une bo-
bine réceptrice. Le temps de propa-
gation de l’onde permet de détermi-
ner la position recherchée. Suivant
les modèles, celle-ci est transmise
sous forme d’une valeur de courant
ou de tension, croissante ou dé-
croissante. Ce système présente
une précision et une reproductibilité
élevée à l’intérieur de la plage de
mesure correspondant à la longueur
nominale.
La zone d’amortissement est située
à l’extrémité de la tige et ne peut
être utilisée à des fins de mesure.
Le capteur peut toutefois y pénétrer.
Le branchement électrique entre le
capteur de déplacement, l’unité de
lecture / la commande et l’alimenta-
tion électrique est assuré par un
câble, qui, selon le modèle, est rac-
cordé au capteur de déplacement
soit de manière inamovible, soit par
un connecteur à fiches.
2 Fonctionnement et propriétés
Cotes de montage du capteur de
déplacement Micropulse:
➥➥
➥➥
➥ Fig. 3-2
Cotes de montage du capteur de
position :
➥➥
➥➥
➥ Fig. 3-4
2.3 Longueurs nominales
disponibles et capteur de
position
Pour adapter de manière optimale le
capteur de déplacement à son utili-
sation, les longueurs nominales
sont livrées dans une plage étendue
et le capteur de position dans diffé-
rents types de construction. Le cap-
teur de position est donc à com-
mander séparément.
Les longueurs nominales disponi-
bles dans les graduations mention-
nées sont les suivantes :
Longeurs nominales
[mm]
par pas de
[mm]
50 ... 500 25
500 ... 1000 50
1000 ... 2000 100
2000 ... 4000 250
autres longueurs nominales sur
demande.
3 Montage
3.1 Variantes de montage
Nous recommandons d’utiliser pour
la fixation des capteurs de déplace-
ment et de position un matériau non
magnétisable.
➥➥
➥➥
➥ Fig. 3-1.
En cas d’utilisation de matériaux
magnétisables, le capteur de dé-
placement doit être protégé con-
tre les perturbations par des me-
sures appropriées.
➥➥
➥➥
➥
Fig. 3-1
Veiller à éloigner suffisamment le
capteur de déplacement et le
vérin des champs magnétiques
extérieurs de forte intensité.
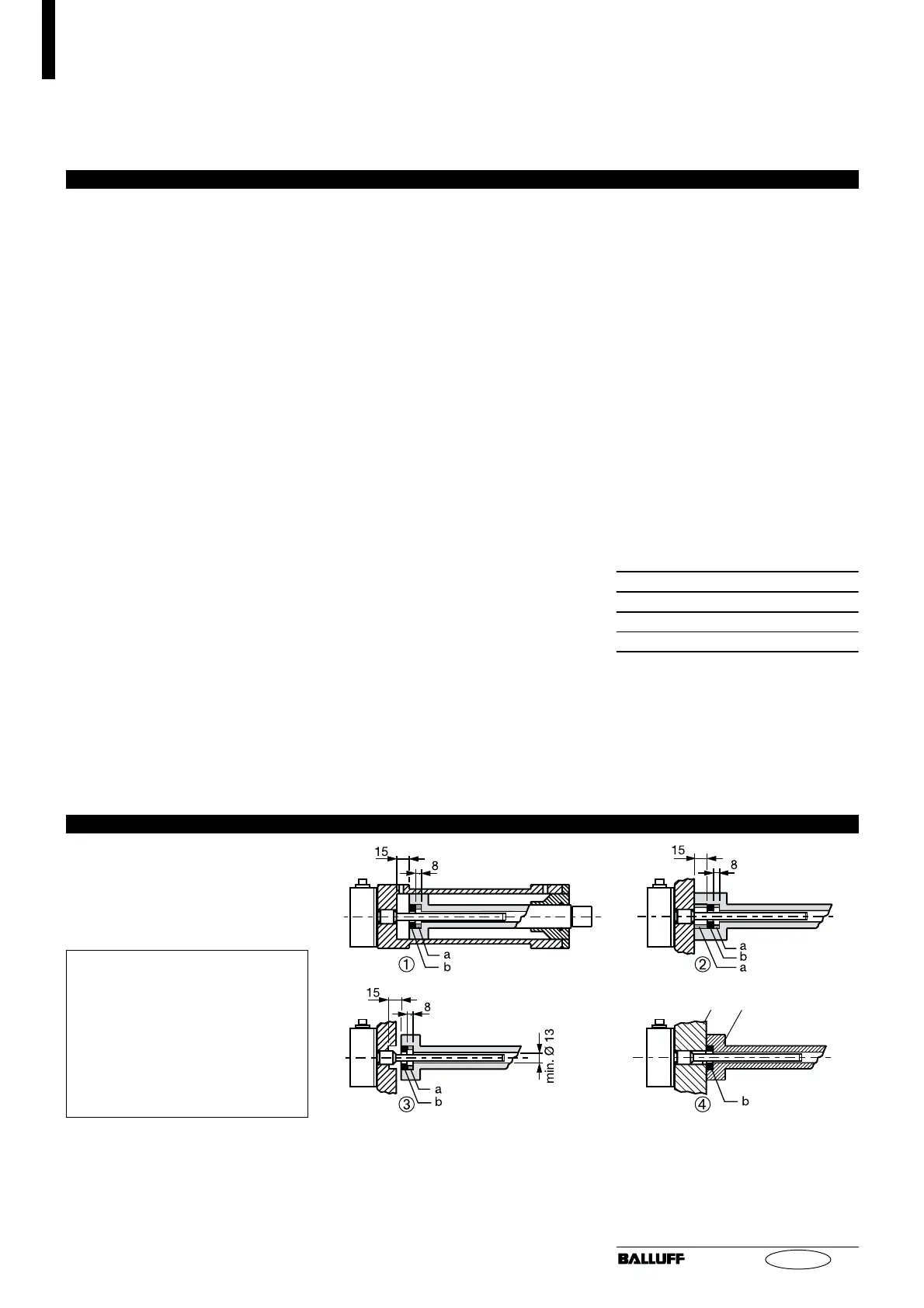
Fig. 3-1 : Variantes de montage
➀ - ➂ cas du matériau magnétisable
➃ cas du matériau non magnétisable
a = entretoise en matériau non
magnétisable
b = capteur de position
matériau non magnétisable

 Loading...
Loading...






