16 english
6
SSI interface (continued)
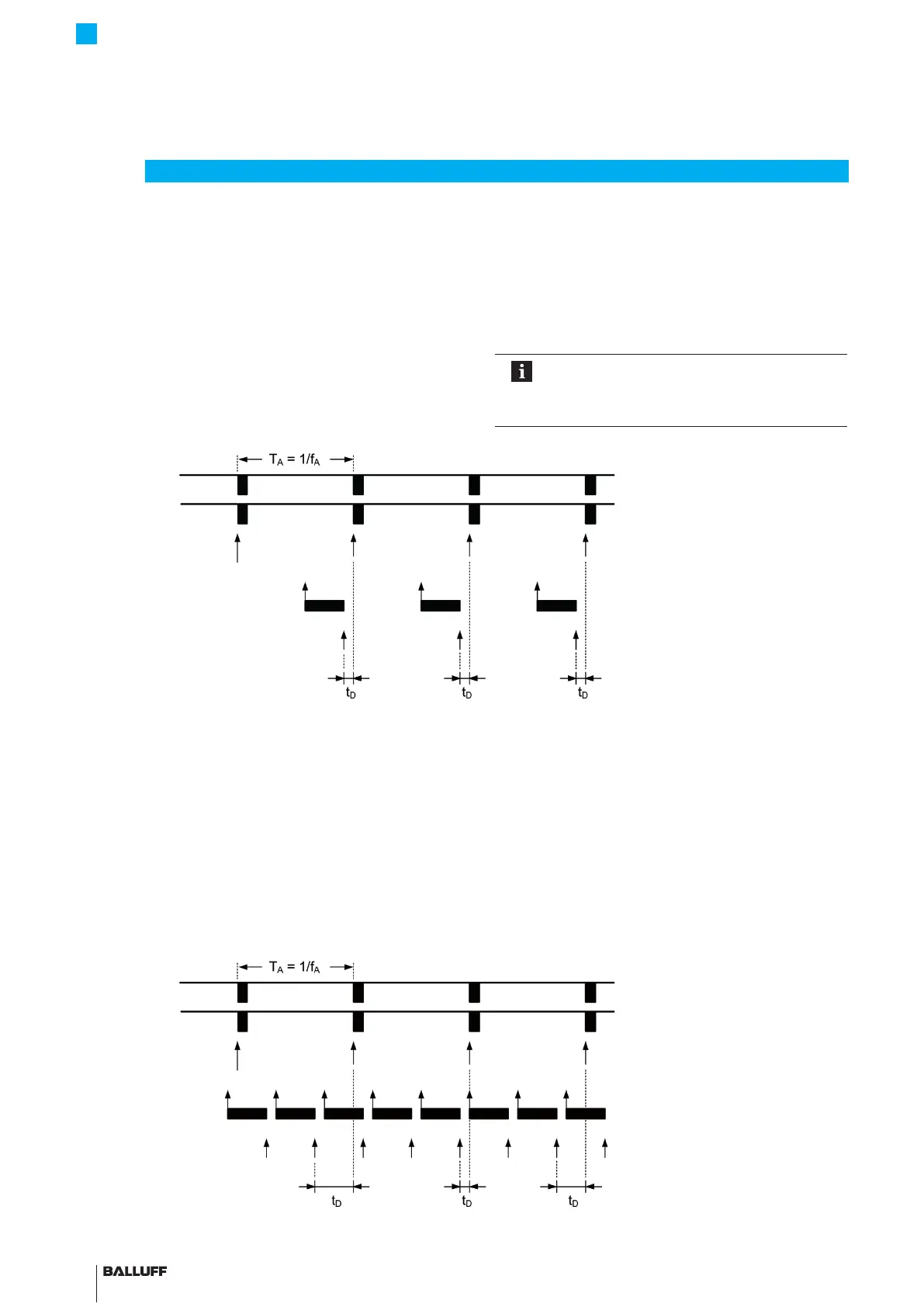
6.4 Synchronous and asynchronous operation
Synchronous operation
A uniform and brief timing is often required for control
applications. The position delay t
D
must be kept as short
and constant as possible. Synchronous operation is thus
intended for closed control loops. Here, the internal
sensing cycle adjusts itself to the external sampling cycle.
The following graphic clarifies this relationship:
Two boundary conditions must be taken into account
during synchronous operation:
– The external sampling frequency f
A
must be in the range
62.5Hz<f
A
<f
A,max
. The maximum permissible sampling
frequency f
A,max
is shown in Fig. 8-1 on page20.
– The sampling frequency must be kept as constant as
possible.
The sampling frequency is the reciprocal value
of the time between two clock packages and
may not be confused with the SSI clock
frequency.
Asynchronous operation
During asynchronous operation, the external sampling
frequency is independent of the internal sampling
frequency of the transducer. Depending on the external
query point, the position is more or less current and the
position delay t
D
is not constant. In the worst case, it is
equal to the internal sampling period. The transducer
always works with the maximum possible internal sampling
frequency. Due to the measuring principle, the maximum
sampling frequency f
A,max
is dependent on the nominal
length of the transducer.
The following graphic shows the behavior of internal and
external sampling in asynchronous operation:
Clk
Data
External sampling
point
New value available
Internal sampling
point + processing
Position delay
Clk
Data
External
sampling point
New value available
Internal sampling
point + processing
Position delay
BTL7-S5 __ (B)-M ____ -A/B/Y/Z(8)-S32/S115/S140/S147/KA __ /FA __
Micropulse Transducer - Rod Style
 Loading...
Loading...








