Conversion tables
Application Manual POWERLINK Controlled Node
Document no. 5.13013.04
61
of 80
C
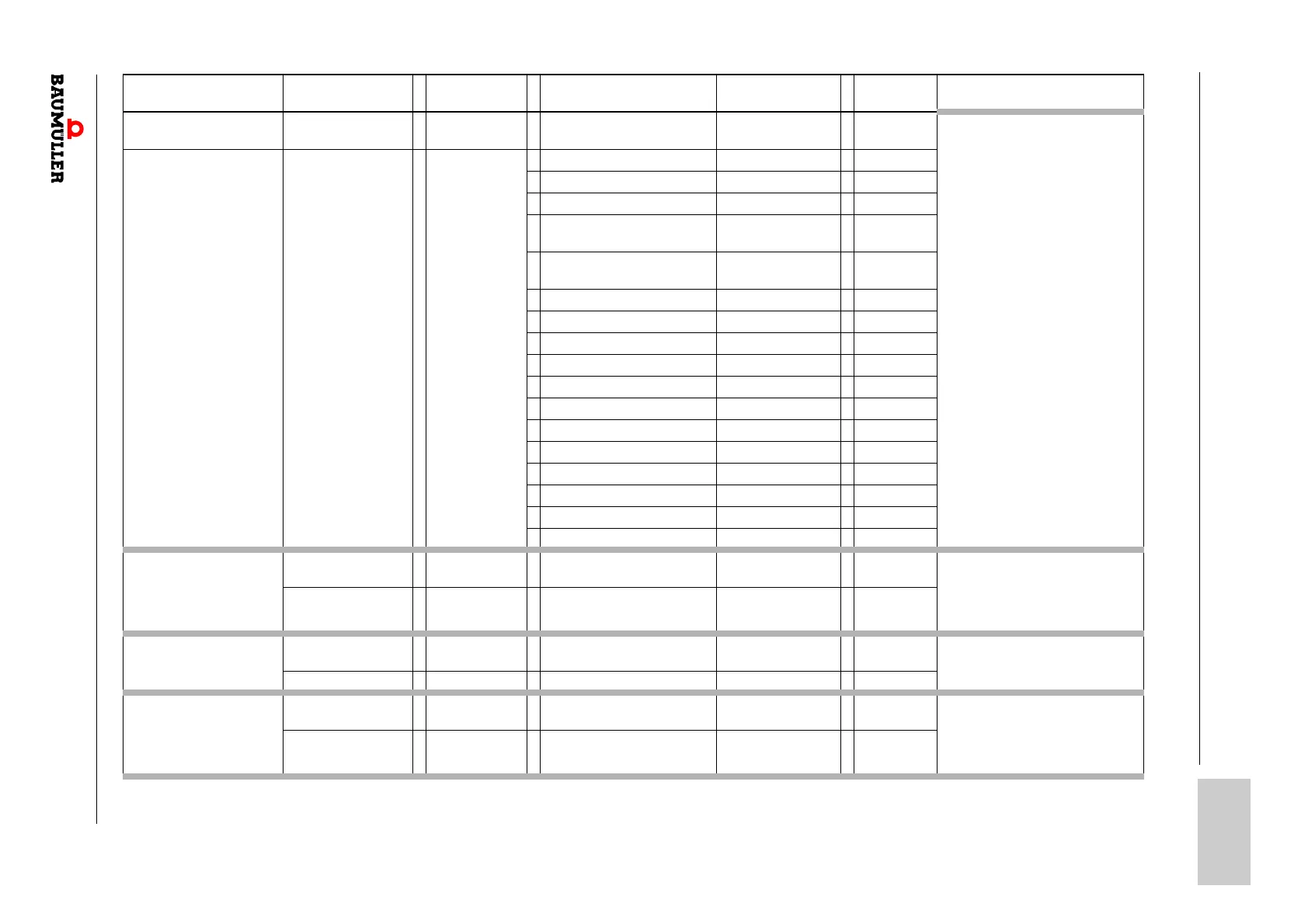
modes_of_operation_
display
0x6061/ro OperationModeAct
(actual operating mode)
P0304 f 0x6061 The CANopen standard designa-
tion, see 0x6060
n Jog operation is set in the con-
troller at value 5, in CANopen it is
set at value -6
n Spindle positioning is set in the
controller at value -6, in
CANopen it is set at value -106
Conversion formalism x = -128 .. 127 f y = x
Autotuning x = -7 f y = x
Spindle positioning x = -6 f y = -106
Synchronous operation el.
gear
x = -5 f y = x
Position control or
Interpolated Position Mode
x = -4 f y = x
Speed control x = -3 f y = 3
Current control x = -2 f y = x
Notch position x = -1 f y = x
not used x = 0
Target position set value x = 1 f y = x
Speed setting 1 x = 2 f y = x
not used x = 3 y = -3
not used x = 4
Jog operation x = 5 f y = -6
Homing operation x = 6 f y = x
not used x = 7
not used x = 8 .. 127
position_demand_value 0x6062/ro PPosSetValue
(actual position value)
P0463 f 0x6062 UINT32 is provided on the option
card with an offset of 2
31
(UINT32
INT32). Only in case of changes
in option module G/H configuration
1 bit
5 = 1, no offset of -2
31
.
x = 0 .. 2
32
- 1 f y = x - 2
31
position_actual_value* 0x6063 /ro PosActValue
(actual position value)
P0462 f 0x6063
x = 0 .. 2
32
- 1 f y = x
position_actual_value 0x6064 /ro PPosActValue
(actual position value)
P0462 f 0x6064 UINT32 is provided on the option
card with an offset of 2
31
(UINT32
INT32). Only in case of changes
in option module G/H configuration
1 bit
5 = 1, no offset of -2
31
.
x = 0 .. 2
32
- 1 f y = x - 2
31
CANopen object Index
Value range
f P. no.
Scaling
Controller parameters P. no.
Value range
f Index
re-scaling
Comment