Mounting and cabling
EL6752 19Version: 2.1
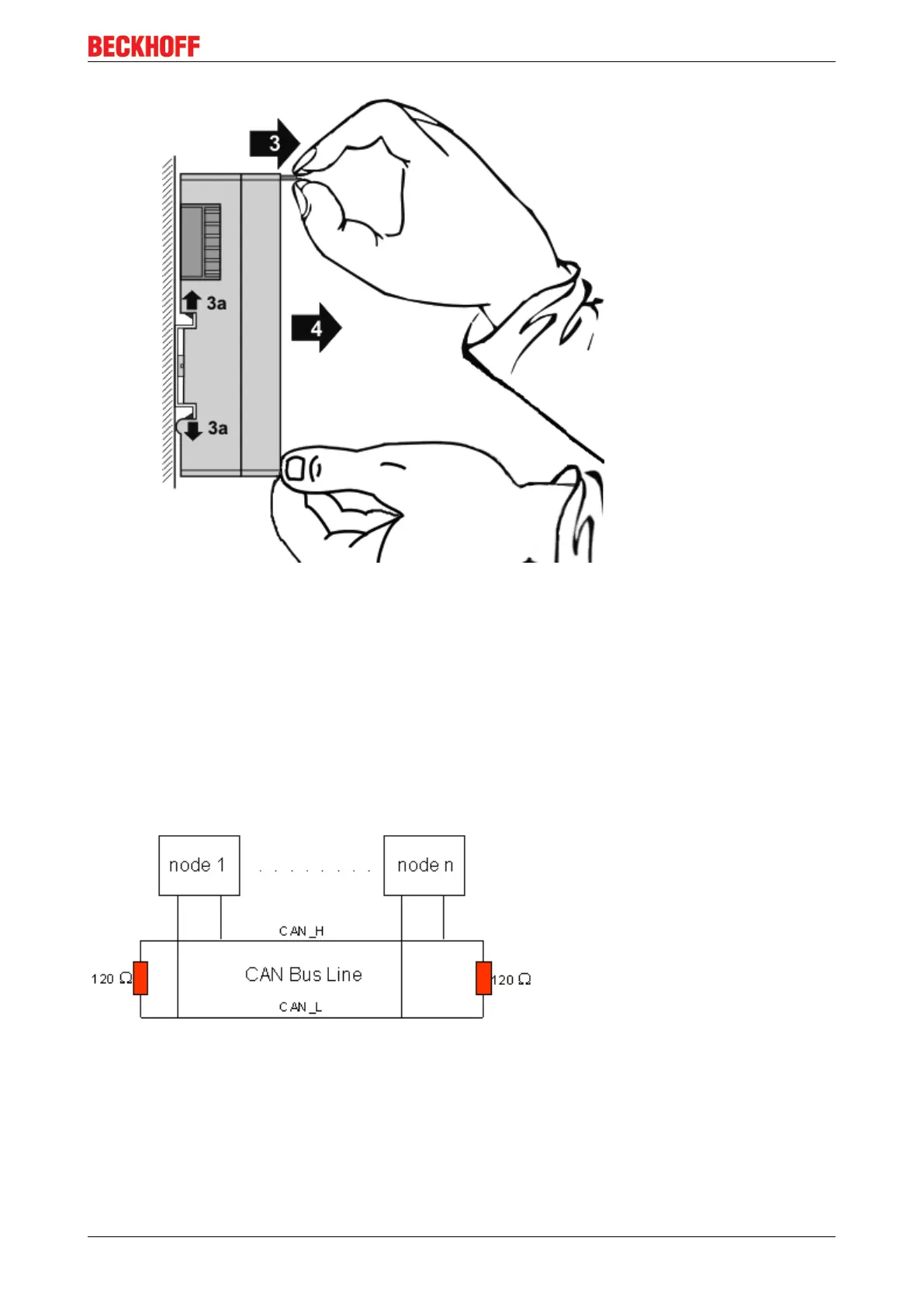
• Pull (4) the terminal module away from the mounting surface.
Avoid canting of the module; you should stabilize the module with the other hand, if required.
4.5 DeviceNet wiring
4.5.1 CAN / DeviceNet topology
CAN/DeviceNet is a 2-wire bus system, to which all participating devices are connected in parallel (i.e. using
short drop lines) (Fig. DeviceNet Topology). The bus must be terminated at each end with a 120 (or 121)
Ohm terminating resistor to prevent reflections. This is also necessary even if the cable lengths are very
short!
Fig.13: DeviceNet topology
Since the CAN signals are represented on the bus as the difference between the two levels, the CAN leads
are not very sensitive to incoming interference (EMI): Both leads are affected, so the interference has very
little effect on the difference.