178 - 1110
DIGITALER INDUSTRIEREGLER
deutsch
Ein PID-Regler besitzt einen Proportional-, einen Integral- und einen Differentialan-
teil (P-, I- und D-Anteil).
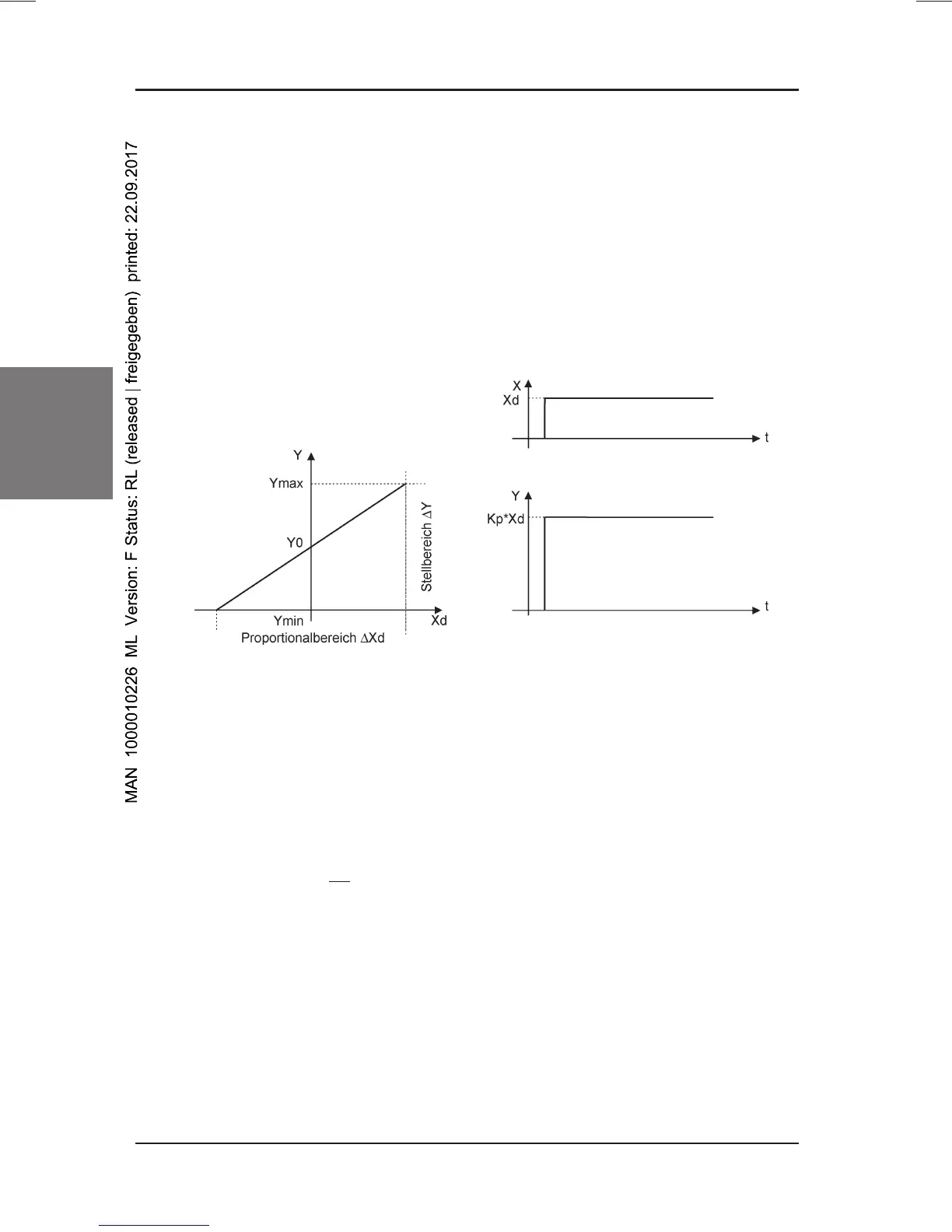
P-Anteil:
Funktion:
Y = Kp · Xd
Kp ist der Proportionalbeiwert (Verstärkungsfaktor). Er ergibt sich als Verhältnis von
Stellbereich ∆Y zu Proportionalbereich ∆Xd.
Kennlinie
Sprungantwort
Eigenschaften:
Ein reiner P-Regler arbeitet theoretisch unverzögert, d.h. er ist schnell und damit
dynamisch günstig. Er hat eine bleibende Regeldifferenz, d.h. er regelt die Auswir-
kungen von Störungen nicht vollständig aus und ist damit statisch relativ ungünstig.
I-Anteil:
Funktion:
Y = ∫ Xd dt
Ti ist die Integrier- oder Stellzeit. Sie ist die Zeit, die vergeht, bis die Stellgröße den
gesamten Stellbereich durchlaufen hat.
9 ANHANG
9.1 Eigenschaften von PID-Reglern
1
Ti

 Loading...
Loading...




