170 - 1110
DIGITALER INDUSTRIEREGLER
deutsch
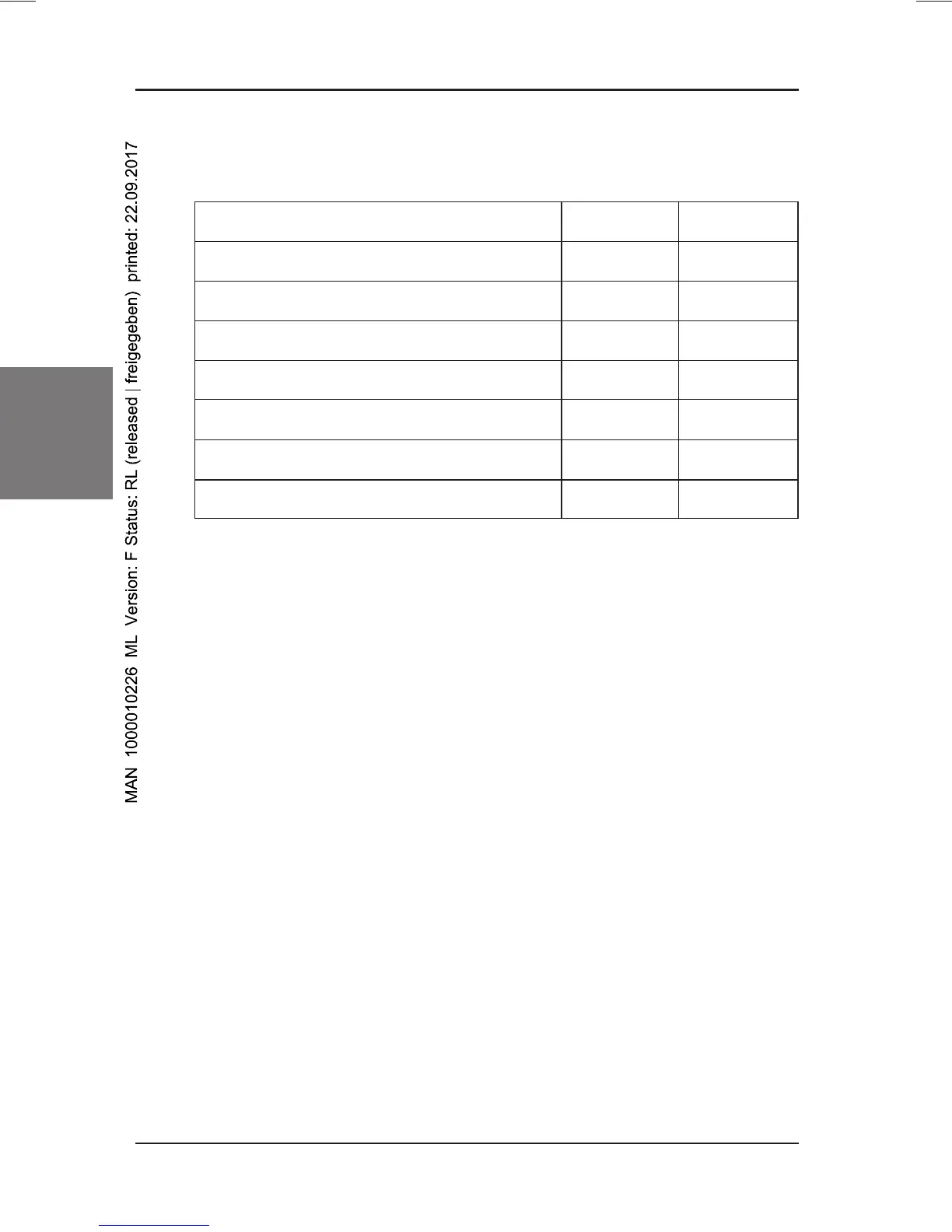
Reglerausgang/Ausgangssignal Tune Adaption
stetige Einheitssignale 0 ... 10 V x x
stetige Einheitssignale 0 ... 20 mA x x
stetige Einheitssignale 4 .. 20 mA x x
2-Punkt-PWM-Signale x
3-Punkt-PWM-Signale x
3-Punkt-Schritt-Signale mit interner Rückführung x
3-Punkt-Schritt-Signale mit externer Rückführung x
Einbeziehbare Reglerausgänge
Die Module
Tune
und
Adaption
können bei Reglerausgängen bzw. Ausgangs-
signalen gemäß folgender Tabelle eingesetzt werden:
Einbeziehbare Reglerstrukturen
Die Funktion
Tune
und
Adaption
können bei folgenden Reglerstrukturen genutzt
werden:
• Standardregler
• Störgrößenaufschaltung
• Kaskadenregelung
Das Tune- und das Adaptionsmodul optimieren die Parameter von PI- und von PID-
Reglerstrukturen. Eine P-Reglerstruktur, die bei Strecken mit Ausgleich im stationä-
ren Zustand zu einer bleibenden Regeldifferenz führt, wird nicht auf direkte Weise
optimiert, sondern in eine PI-Struktur umgewandelt.
Werden als Startparameter vor Beginn von
Tune
bzw.
Adaption
ausschließlich die
beiden PI-Parameter
Verstärkung Kp
und
Nachstellzeit Tn
vorgegeben (
Vorhaltezeit
Tv = 0), erfolgt die Optimierung einer PI-Reglerstruktur. Wird die Optimierung einer
PID-Struktur gewünscht, ist als Startwert für die Vorhaltezeit Tv = 0,1 sec. einzustel-
len.
Während bei der Funktion
Tune
eine direkte, d.h. startparameterunabhängige Be-
rechnung der Reglerparameter erfolgt, ist für die Funktion
Adaption
die geeignete
Wahl von Startparametern von Bedeutung. Das heißt, die Ausgangsbasis für die
einzelnen Optimierungsschritte bilden die jeweils aktuell vorliegenden Regler-
parameter. Deshalb wird empfohlen, bei der ersten Inbetriebnahme die Tune-Funkti-
on zu aktivieren, um einen geeigneten Startparametersatz für den Einsatz des
Adaptionsmoduls zu erhalten.
 Loading...
Loading...






