84 - 1110
DIGITAL INDUSTRIAL CONTROLLER
english
A PID controller has a proportional, an integral and a differential component (P, I and
D components).
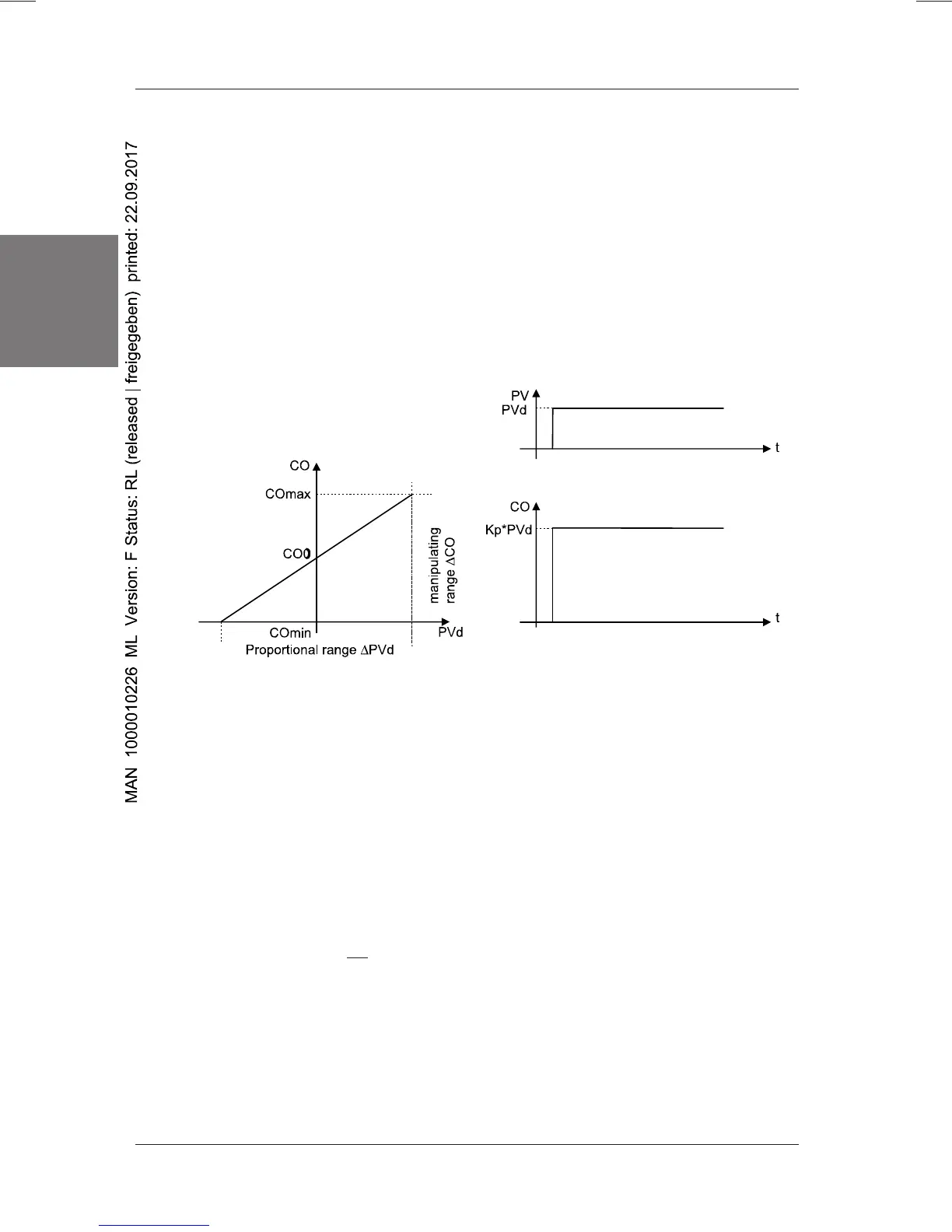
P component:
Function:
CO = Kp • PVd.
Kp is the proportional action coefficient / Gain. It results from the ratio of the
manipulating range ∆CO to the proportional range ∆PVd.
Characteristic Step response
Characteristics:
Theoretically, a pure P controller operates without delay, i.e. it is fast and therefore
dynamically favorable. It has a lasting system deviation, i.e. it does not balance out
the effects of disturbances completely and is therefore relatively unfavorable from
the static point of view.
I component:
Function
: CO = ∫ PVd dt
Ti is the integration or manipulating time. This is the time that elapses before the
manipulated variable has passed through the complete manipulating range.
9 ANNEX
9.1 Characteristics of PID controllers
1
Ti

 Loading...
Loading...




