e30ba168.11
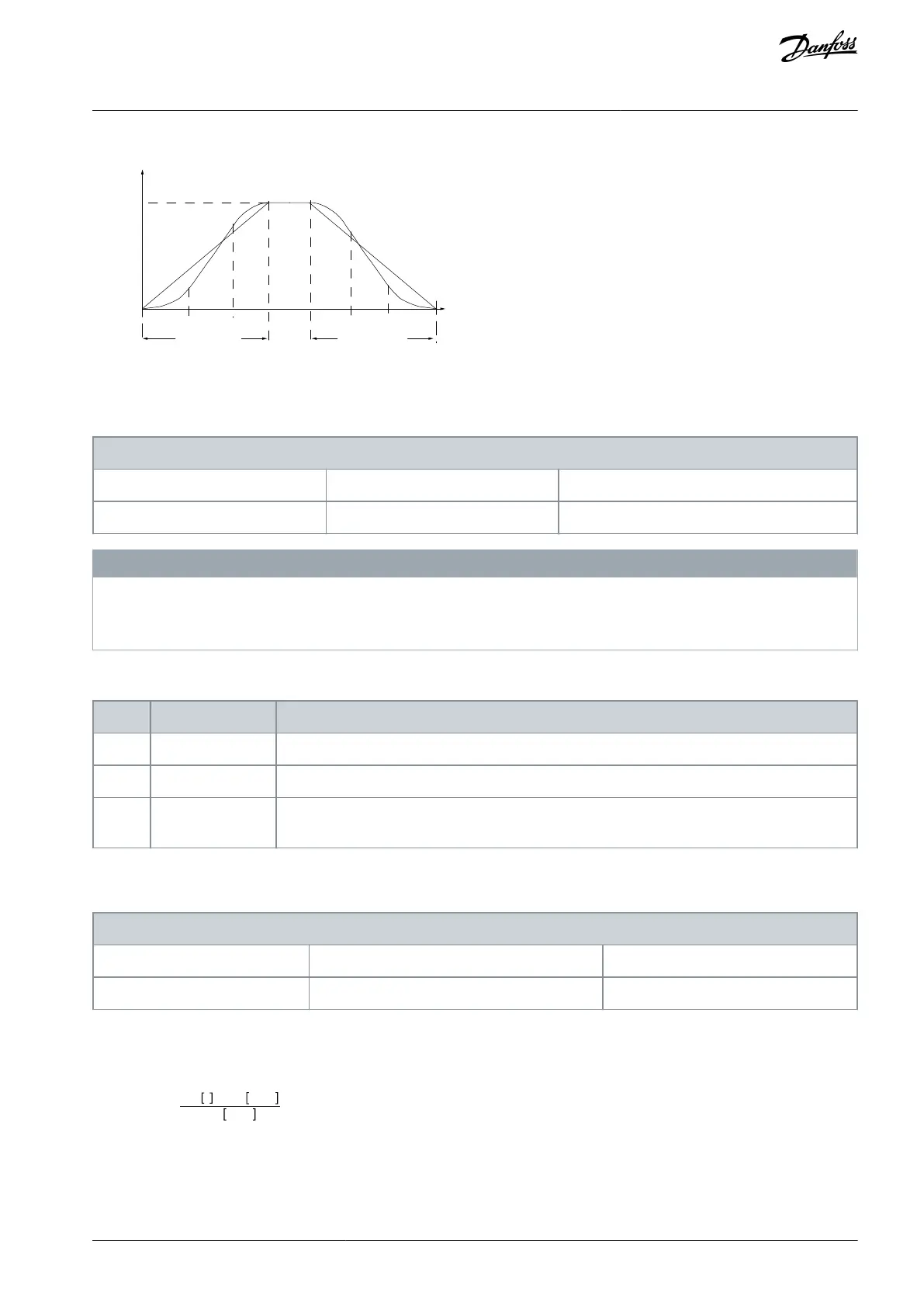
Ramp (X) S-Ramp
Ratio at Accel.End
Jerk compensated
Ramp (X)
Up Time
Ramp (X)
S-Ramp
Ratio at
Accel.End
Linear
Ramp (X)
S-Ramp
Ratio at
Dec.End
Ramp (X) S-Ramp
Illustration 52: Non-linear Ramping Times
Parameter 3-40 Ramp 1 Type
Table 222: Parameter 3-40 Ramp 1 Type
Default value: [1] Linear
Change during operation: True
N O T I C E
If [1] S-ramp Const Jerk is selected and the reference during ramping is changed, the ramp time may be prolonged to realize a
jerk-free movement, which may result in a longer start or stop time. Extra adjustment of the S-ramp ratios or switching initiators
may be necessary.
Select the ramp type, depending on requirements for acceleration/deceleration. A linear ramp gives constant acceleration during
ramping. An S-ramp gives non-linear acceleration, compensating for jerk in the application.
Acceleration with lowest possible jerk.
S-ramp based on the values set in parameter 3-41 Ramp 1 Ramp Up Time and parameter 3-42 Ramp
1 Ramp Down Time.
Parameter 3-41 Ramp 1 Ramp Up Time
Table 223: Parameter 3-41 Ramp 1 Ramp Up Time
Default value: Size related
Parameter type: Range, 0.01 - 3600 s
Change during operation: True
Enter the ramp-up time, that is the acceleration time from 0 RPM to the synchronous motor speed n
S
. Select a ramp-up time which
prevents the output current from exceeding the current limit in parameter 4-18 Current Limit during ramping. The value 0.00 corre-
sponds to 0.01 s in speed mode. See ramp-down time in parameter 3-42 Ramp 1 Ramp Down Time.
Par . 3 − 41 =
tacc s × ns RPM
ref RPM
AU275636650261en-000101 / 130R0334 | 143Danfoss A/S © 2022.12
Parameter Descriptions
VLT AutomationDrive FC 301/302
Programming Guide
 Loading...
Loading...















