NOTE
OVC can be activated when running a PM motor (when
1-10 Motor Construction is set to [1] PM non salient SPM).
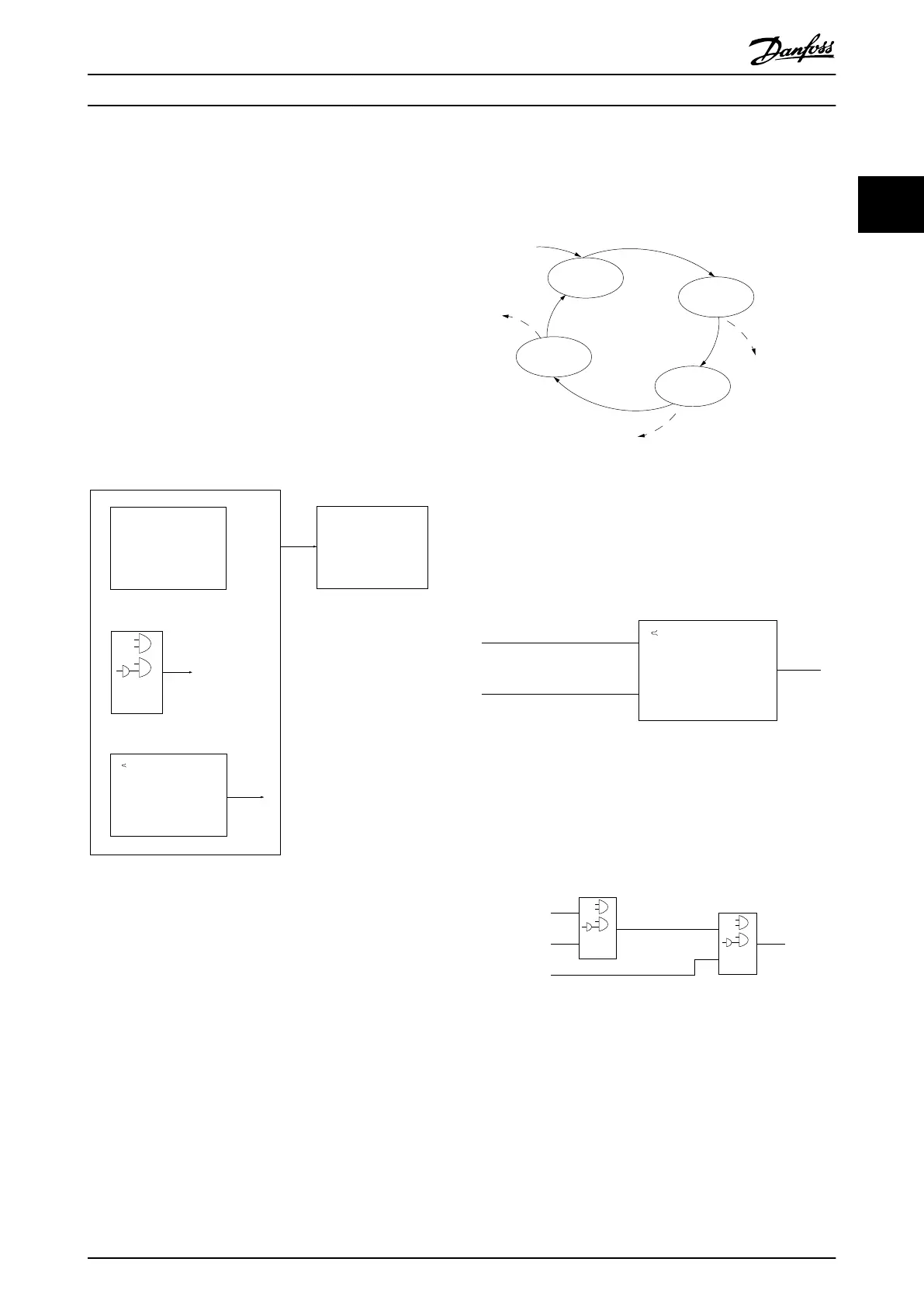
2.10 Smart Logic Controller
Smart Logic Control (SLC) is essentially a sequence of user
defined actions (see 13-52 SL Controller Action [x]) executed
by the SLC when the associated user defined event (see
13-51 SL Controller Event [x]) is evaluated as TRUE by the
SLC.
The condition for an event can be a particular status or
that the output from a Logic Rule or a Comparator
Operand becomes TRUE. That will lead to an associated
action as illustrated:
. . .
. . .
Par. 13-43
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-51
SL Controller Action
130BB671.10
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital inpute X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Illustration 2.24 Associated Action
Events and actions are each numbered and linked together
in pairs (states). This means that when event [0] is fulfilled
(attains the value TRUE), action [0] is executed. After this,
the conditions of event [1] will be evaluated and if
evaluated TRUE, action [1] will be executed and so on.
Only one event will be evaluated at any time. If an event is
evaluated as FALSE, nothing happens (in the SLC) during
the current scan interval and no other events will be
evaluated. This means that when the SLC starts, it
evaluates event [0] (and only event [0]) each scan interval.
Only when event [0] is evaluated TRUE, will the SLC
execute action [0] and start evaluating event [1]. It is
possible to programme from 1 to 20 events and actions.
When the last
event/action has been executed, the
sequence starts over again from event [0]/action [0].
Illustration 2.25 shows an example with three event/actions:
130BA062.13
State 1
Event 1/
Action 1
State 2
Event 2/
Action 2
Start
event P13-01
State 3
Event 3/
Action 3
State 4
Event 4/
Action 4
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Illustration 2.25 Sequence with Three Event/Actions
Comparators
Comparators are used for comparing continuous variables
(i.e. output frequency, output current, analog input etc.) to
fixed preset values.
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Illustration 2.26 Comparators
Logic Rules
Combine up to three boolean inputs (TRUE/FALSE inputs)
from timers, comparators, digital inputs, status bits and
events using the logical operators AND, OR, and NOT.
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Illustration 2.27 Logic Rules
2.11 Extreme Running Conditions
Short circuit (motor phase – phase)
The frequency converter is protected against short circuits
by means of current measurement in each of the three
motor phases or in the DC link. A short circuit between
two output phases will cause an overcurrent in the
inverter. The inverter will be turned off individually when
Product Overview
VLT
®
AutomationDrive FC 360 Design Guide
MG06B202 - VLT
®
is a registered Danfoss trademark 39
2 2
 Loading...
Loading...






