ASDA-M Chapter 8 Parameters
Revision December, 2014 8-109
Settings:
When increasing the value of position control integral, reducing
the position steady-state error, it may easily cause position
overshoot and noise if the value is set too big.
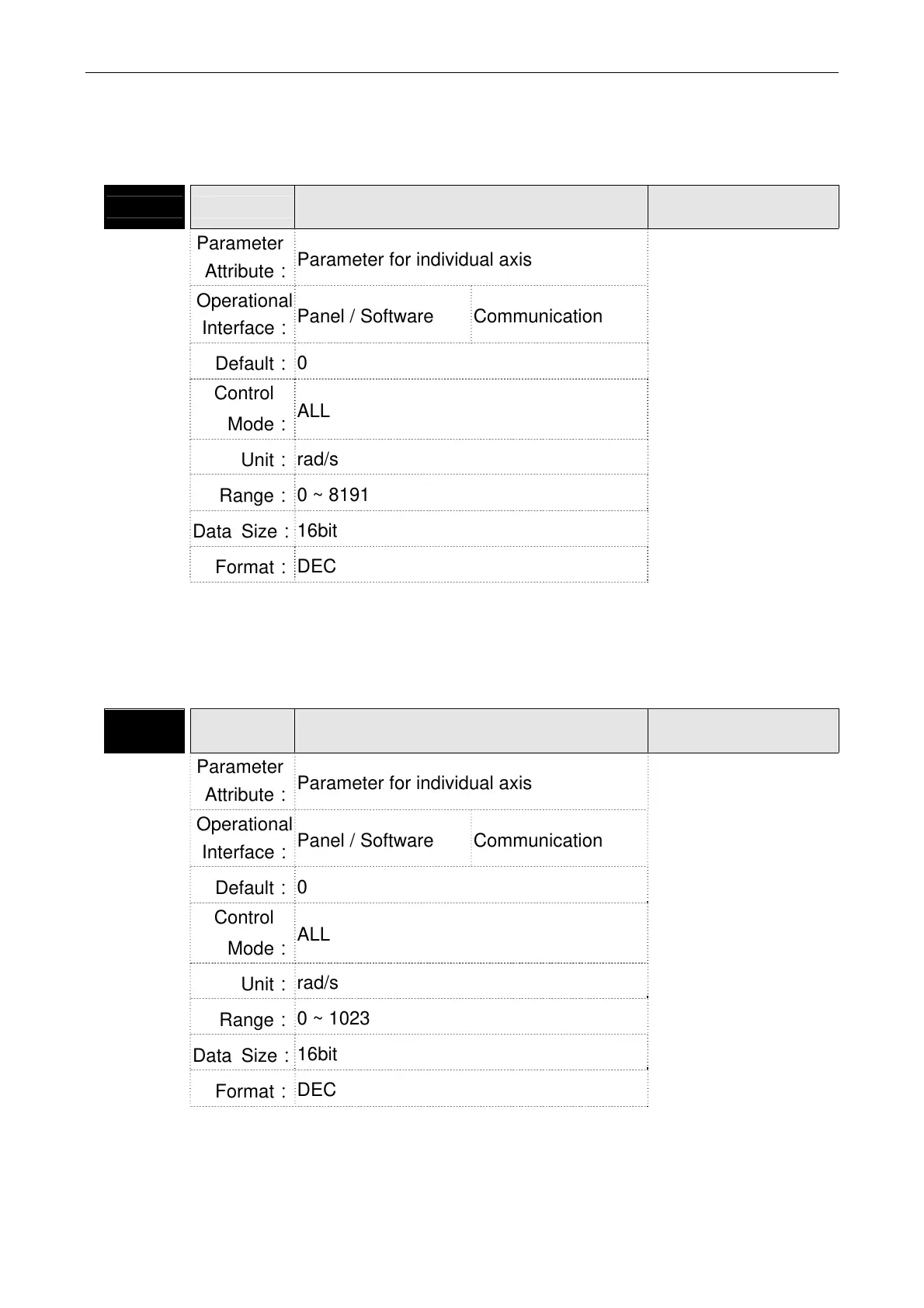
P2-54 SVP
The Gain of Synchronous Speed
Control
Address: 026CH
026DH
Parameter
Attribute:
Parameter for individual axis
Related Section: -
Operational
Interface:
Panel / Software Communication
Default:
0
Control
Mode:
ALL
Unit:
rad/s
Range:
0 ~ 8191
Data Size:
16bit
Format:
DEC
Settings:
When increasing the value of synchronous speed control, it can
enhance the speed following of two motors. However, if the value
is set too big, it may easily cause vibration and noise.
(Firmware, V1.005 sub00 will be provided soon)
P2-55 SVI
Integral Compensation to Synchronous
Speed
Address: 026EH
026FH
Parameter
Attribute:
Parameter for individual axis
Related Section: -
Operational
Interface:
Panel / Software Communication
Default:
0
Control
Mode:
ALL
Unit:
rad/s
Range:
0 ~ 1023
Data Size:
16bit
Format:
DEC

 Loading...
Loading...





