ASDA-M Chapter 8 Parameters
Revision December, 2014 8-113
When it is in speed mode, the speed command comes
from the speed command of Z axis.
When it is in torque mode, the torque command comes
from the torque command of Z axis.
DI synchronization
0: DI synchronization is used
DI status of the two axes of the gantry is the same
1: DI synchronization is not used
The DI status of two axis of the gantry is not synchronous.
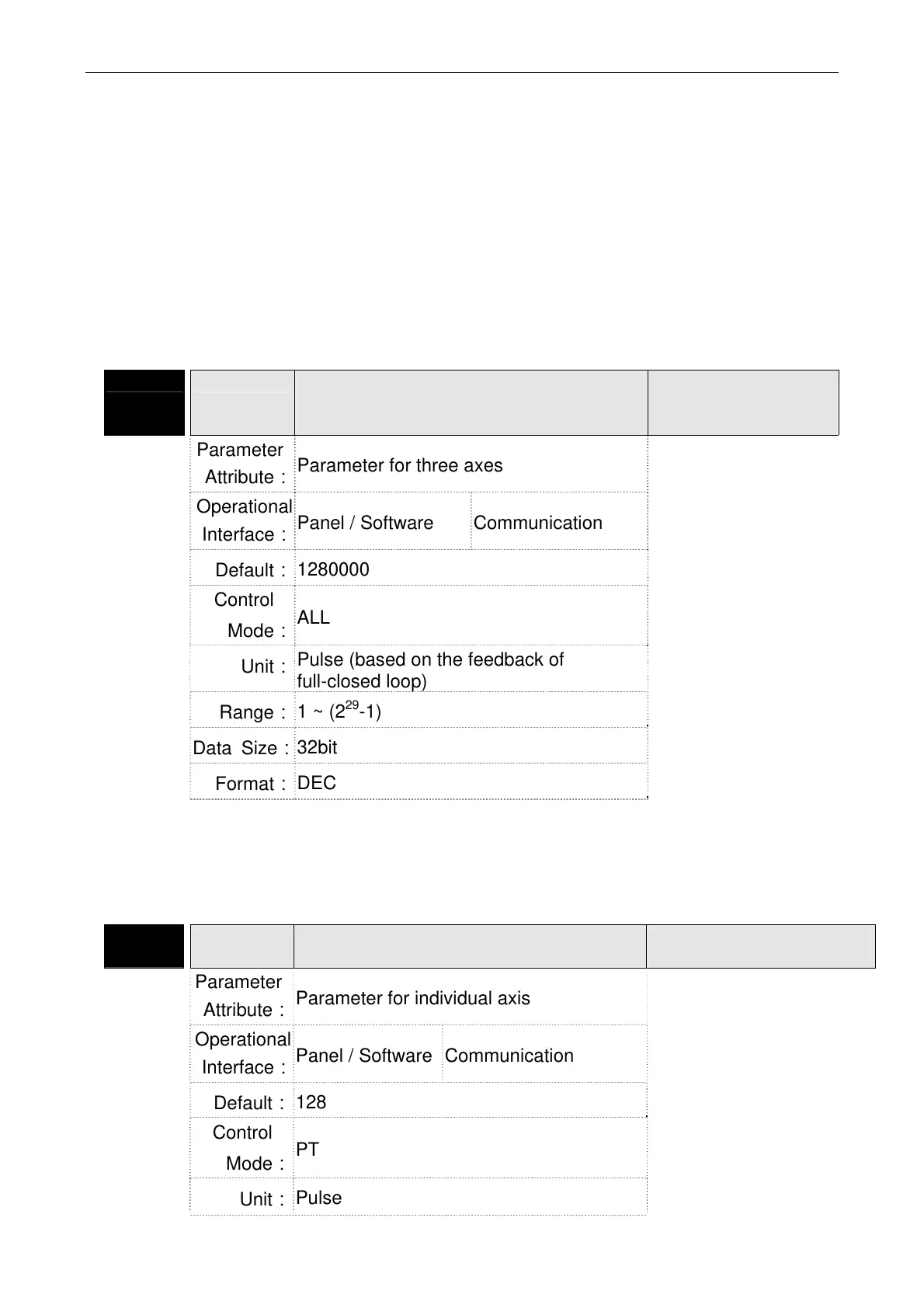
P2-59 SERR
The Setting Value for Signaling
Exceeding Deviation Error Between
Two Axes
Address: 0276H
0277H
Parameter
Attribute:
Parameter for three axes
Related Section: -
Operational
Interface:
Panel / Software Communication
Default:
1280000
Control
Mode:
ALL
Unit:
Pulse (based on the feedback of
full-closed loop)
Range:
1 ~ (2
29
-1)
Data Size:
32bit
Format:
DEC
Settings:
Set it as the two axes of gantry motion, if the feedback deviation
between two axes exceeds the setting value, two axes will stop
operating and show the alarm, AL081.
(Firmware, V1.005 sub00 will be provided soon)
P2-60 GR4 Gear Ratio (Numerator) (N2)
Address: 0278H
0279H
Parameter
Attribute:
Parameter for individual axis
Related Section: -
Operational
Interface:
Panel / Software Communication
Default:
128
Control
Mode:
PT
Unit:
Pulse

 Loading...
Loading...





