Application Examples ASDA Series Application Note
3-118 March, 2015
Pulse number of master axis after
rotating a cycle: (P5-84/P5-83) = L
Master axis position (X)
Slave axis
position (Y)
Current
engaged
position
Alignment target
position P5-96
Alignment
correction value
= Y_Drift
Figure 3.8.20 Macro F
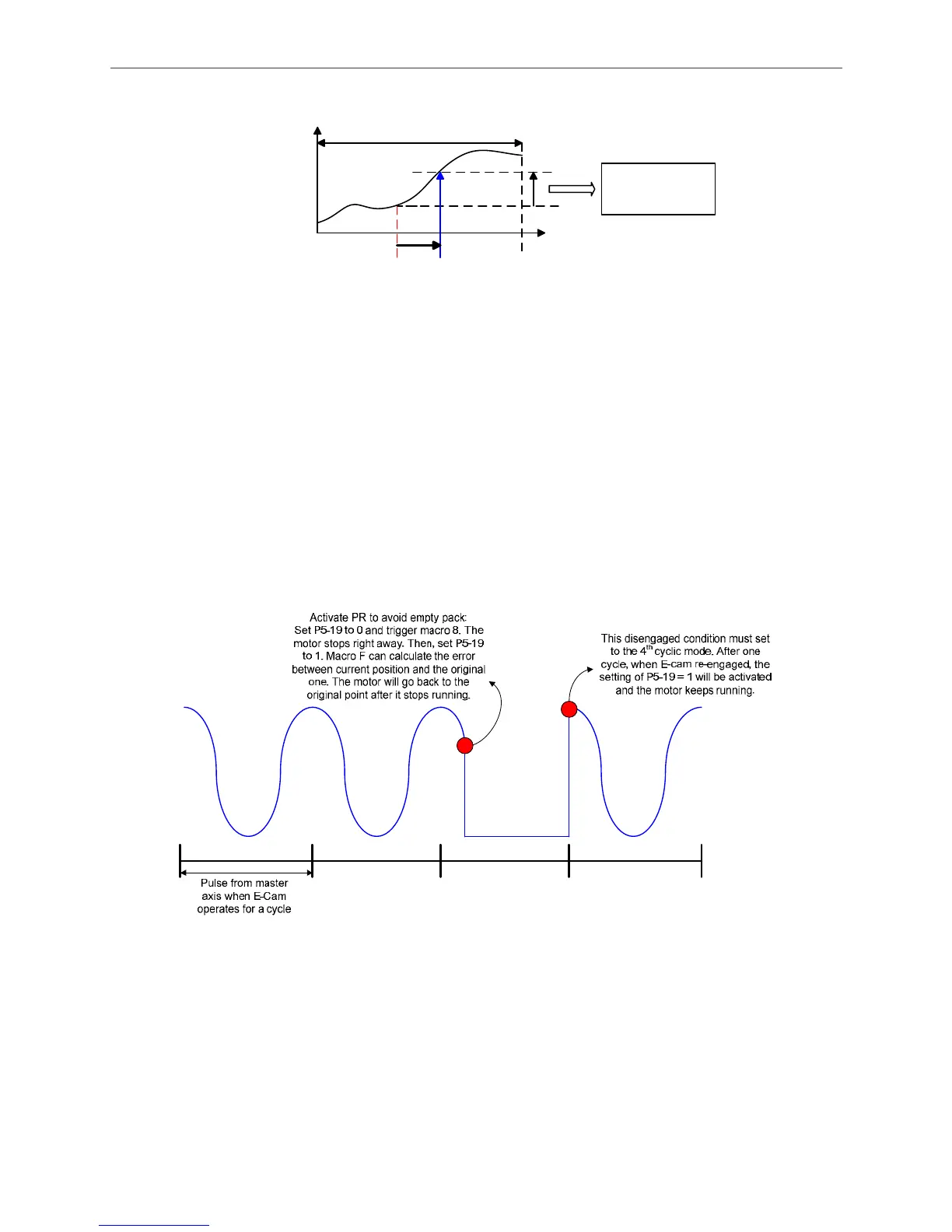
When PR is triggered, the system will set P5-19 to 0 and trigger macro 8 to enable the setting of
P5-19 = 0. The motor will stop since the E-Cam curve scaling is 0. After macro 8 is triggered, the
setting of P5-19 can be changed back to the original one (P5-19 = 1). When the cutter stops, use
macro F to calculate the error between cutter’s current and original position. Then, write the error
into the PR data and trigger it to return the axis to the original position. At the moment, the cutter
axis is engaged, but master axis still keeps sending pulses to cutter axis. The reason the cutter
does not operate is simply because P5-19 = 0. The disengaged condition is set as No. 4 cycle
mode, when this cycle is completed and disengaged again, P5-19 = 1 and the cutter axis starts
operating.
Figure 3.8.21 Avoid empty pack
Anti-cut PR procedure, see figure 3.8.22:
PR#6: Parameter setting of macro F is to set up going trip PR. This application is to move the
cutter axis to 0 degree from current position. Setting up return trip PR is not needed.
PR#7: Parameter setting of macro F is to set up available forward rate. Set the going trip as the
available max. proportion of forward path. The setting is based on the mechanism. If the
 Loading...
Loading...





