ASDA Series Application Note Chapter 4 Application Techniques
March, 2015 4-33
The following macros are available from version V1.038 sub26 (included):
Command Core 000Fh Calculate the moving distance between current and target
position for PR positioning.
General Parameters N/A
Macro parameters P5-93.Low_Word = UZTX(4 digits, HEX)
YX (PR number of going trip) = 0 ~ 0X3F, it is invalid if the
value is set to 0.
UZ (PR number of return trip) = 0 ~ 0X3F, it is invalid if the
value is set to 0.
P5-93.Hi_Word = it has to be set to 0.
P5-95 (Available forward rate)= 0 ~ 100 (%)
P5-96 (target position X); Unit: pulse number of master axis
=0 ~ (P5-84/P5-83) -1.
Monitor variable 062 (3Eh): It displays the current engaged position (X) of master axis.
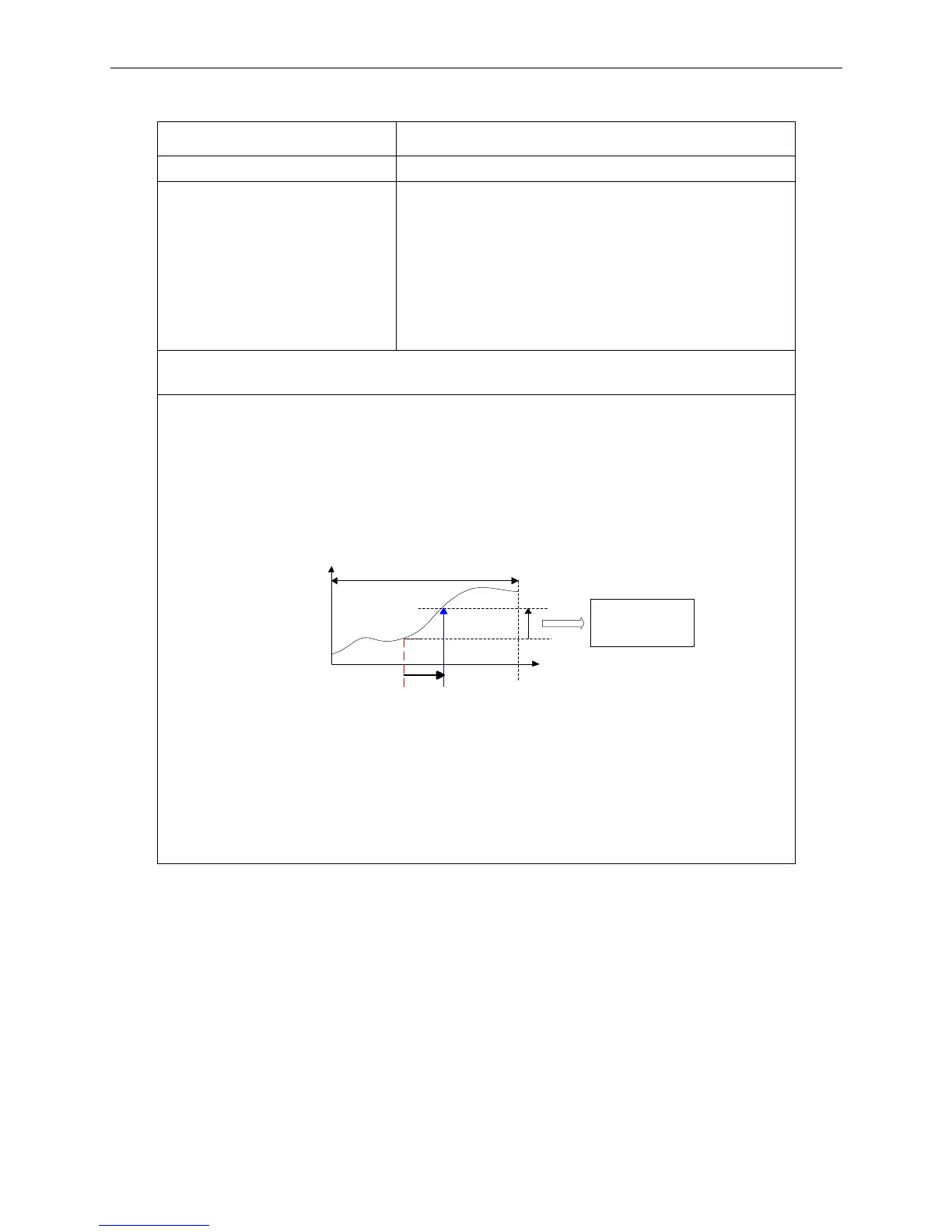
This macro command calculates the moving distance between current and target engaged
position (X) and writes into the specified PR.
During E-Cam operation, if users desire to move the slave axis to the specified position when
master axis stops and still in engaged status, this macro command can calculate the correct
moving distance (Y_Drift) of going trip for PR positioning.
When master axis resumes the operation, use another PR to run the moving distance of return
trip (-Y_Drift), it returns to the original position (moving distance of going trip + moving distance
of return trip = 0.) E-Cam position remains the same.
Pulse number of master axis after
rotating a cycle: (P5-84/P5-83) = L
Master axis position (X)
Slave axis
position (Y)
Current
engaged
position
Alignment target
position P5-96
Alignment
correction value
= Y_Diff
Note: No matter it is going trip or return trip, use incremental command when using PR.
When E-Cam moves from current position to the target one, it can rotate at forward or reverse
direction. Due to the cyclic operation, it can reach the target position either at forward or reverse
direction. However, the moving distance between both is usually different. Use available forward
rate to plan the timing of forward and reverse rotation.
*Available forward rate: The available max. proportion of forward path
 Loading...
Loading...





