ASDA Series Application Note Introduction of PR Operation
March, 2015 1-31
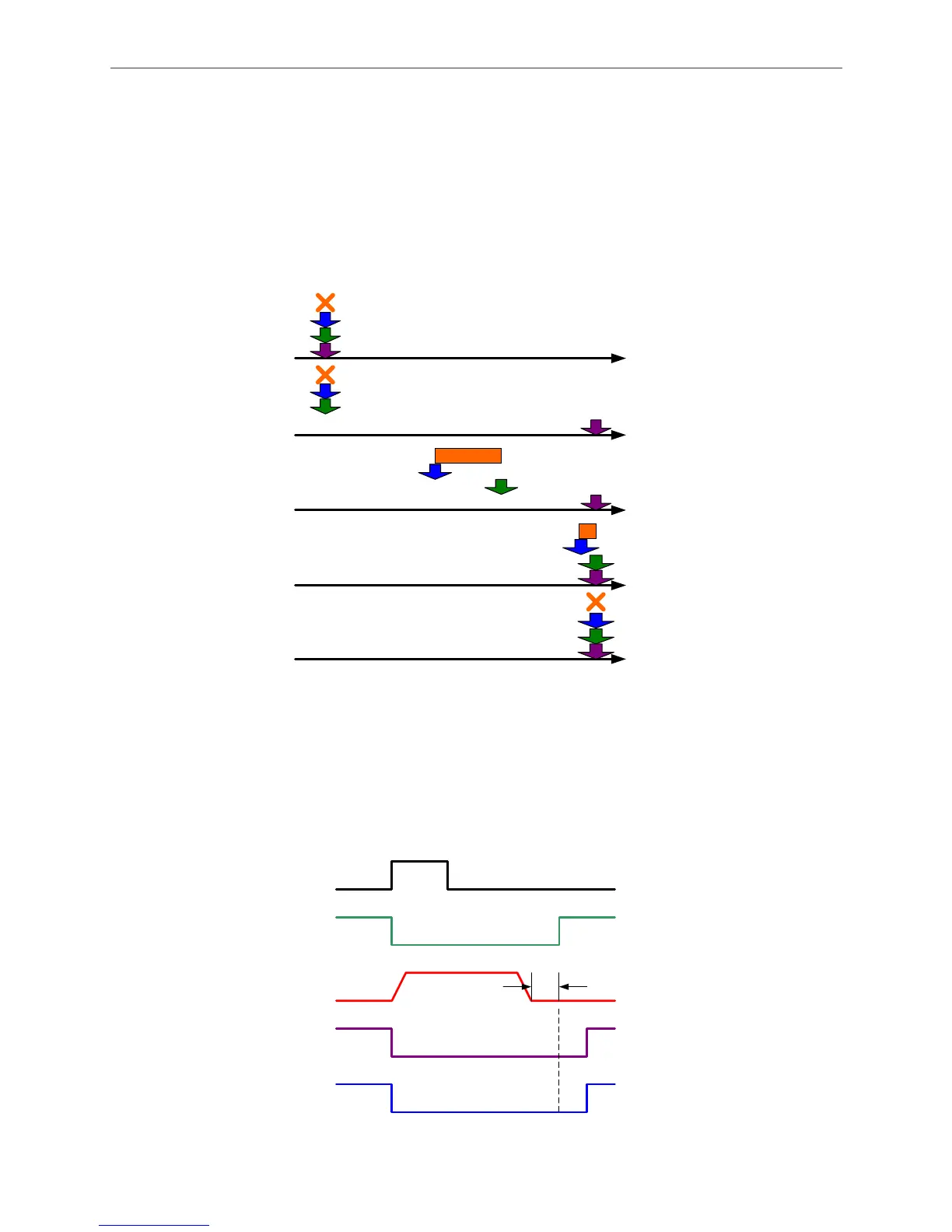
As feedback value has to be identical to the command value, Cmd_O = Fb_PUU + Err_PUU.
Shown in Figure 1.40, after the servo issues the command, which is an internal one, the servo
will immediately know its target destination, which is Cmd_E in this case. However, motor has to
operate according to the motion command (acceleration/deceleration and target speed) until
reaching the target. Cmd_O command requests the motor to move forward step by step as
specified. The current position sent by motor is Fb_PUU; Err_PUU is the actual amount that the
motor falls behind Cmd_O.
Cmd_E
Cmd_O
Fb_PUU
Err_PUU
Before
command
accepted
Cmd_E
Cmd_O
Fb_PUU
Err_PUU
After
command
accepted
Cmd_E
Cmd_O
Fb_PUU
Err_PUU
Command
being
executed
Cmd_E
Cmd_O
Fb_PUU
Err_PUU
Command
finished
Cmd_E
Cmd_O
Fb_PUU
Err_PUU
Positioning
completely
Figure 1.40 Example of Position Command
In PR mode, after command is completely issued and motor is in place, DO.MC_OK will be On.
Demonstrated in Figure 1.41, DO.CMD_OK will be ON when the command is completed
(including delay time) and motor is in place. If delay time is long, when motor has reached the
target position but the command has not been completed, DO. MC_OK will not be On; it will wait
for the conditions to be fulfilled, it will wait until DO.TPOS and DO.CMD_OK are both on.
DI.CTRG
DO.CMD_OK
COMMAND
DO.TPOS
DO.MC_OK
DLY
Target
position
reached
(TPOS ) AND
(CMD_OK)
Figure 1.41 Example of Monitor Signal MC_OK

 Loading...
Loading...




