Introduction of PR Operation ASDA Series Application Note
1-56 March, 2015
Example 5:
PR
#1
Pos iti on (3)
D=0 S= 20.0 rpm
20 000 0P UU, I NC
PR
#2
(I)
Jump
DLY=0
PR#10
PR
#10
(I)
Write
DLY=5000
P5-55=10
PR
#11
(I)
Positi on (3)
D=0, S=100.0 rpm
30 000 0 PUU , I NC
PR
#12
(I)
Write
DLY=0
P5-55=12
(B ) 1ms(A) 1ms
Command Group
,
Command Group
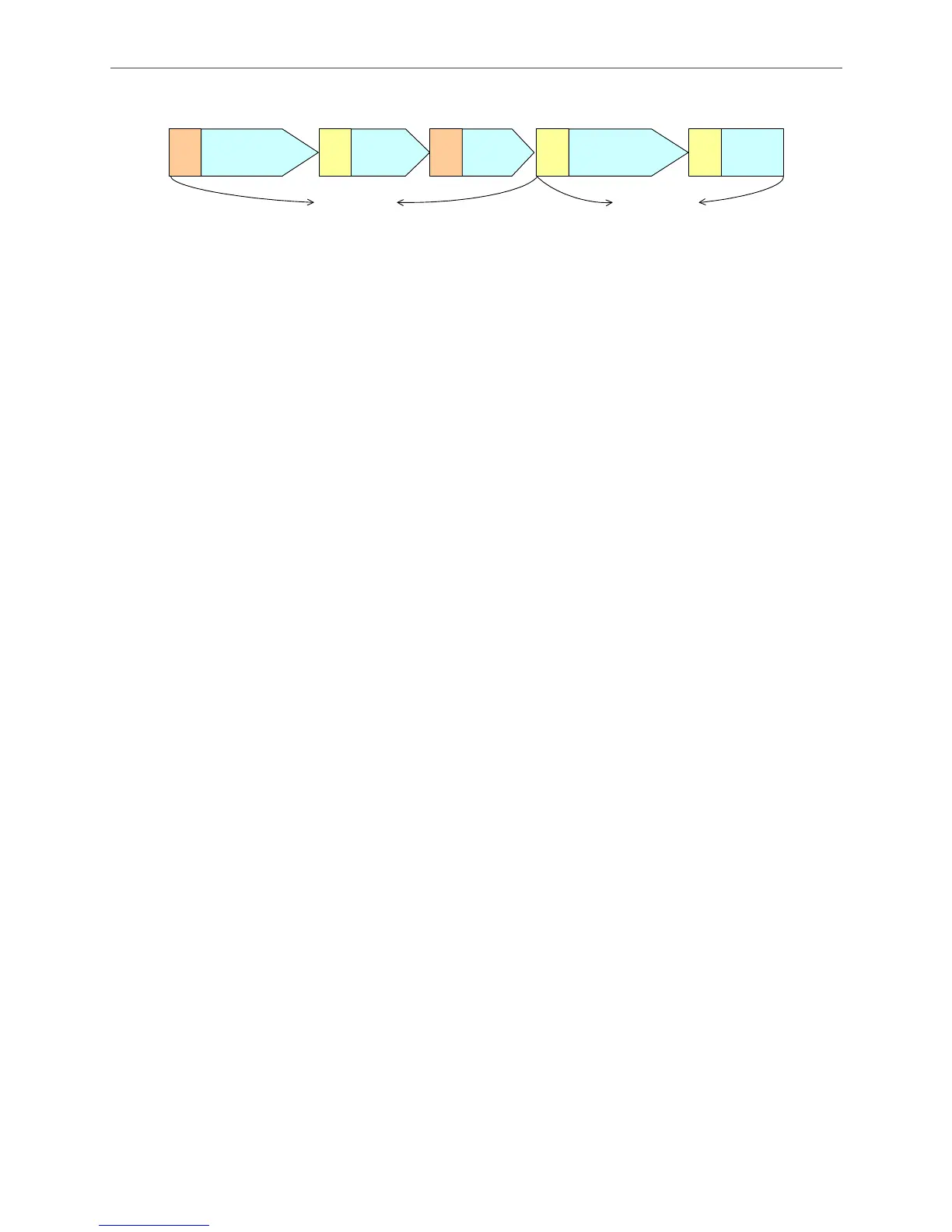
Figure 1.74 Example 5
PR Motion Analysis:
In figure 1.74, only PR#1 has no interrupt; as PR#1 is the Head PR, PR#1, PR#2, and PR#10 will
enter PR executor at the same 1 ms. However, since PR#10 has set delay time of 5000 ms,
PR#11 and PR#12 will enter the executor after 5000 ms.
In PR executor, PR#1, PR#2, and PR#10 are consecutively carried out. The motion command
from PR#1 will enter the motion command generator to make the motor run when this PR
command is completed. After PR editor has completed PR#10, it waits for 5 seconds and then
carries out the next PR command. And motion command from PR#1 will be completed within 5
seconds.
After 5 seconds, PR editor will go on to carry out PR#11 and PR#12. The motion command from
PR#11 will enter motion command generator to make the motor run. Therefore, motion
commands from PR#1 and PR#11 will both be carried out. Besides, PR#12 will interrupt PR#11
so P5-55 = 12 after 5 seconds.
 Loading...
Loading...





