9 Electrical CAM
DVP-PM Application Manual
9-50
9.4.2.5 Offset Compensation to Slave Error
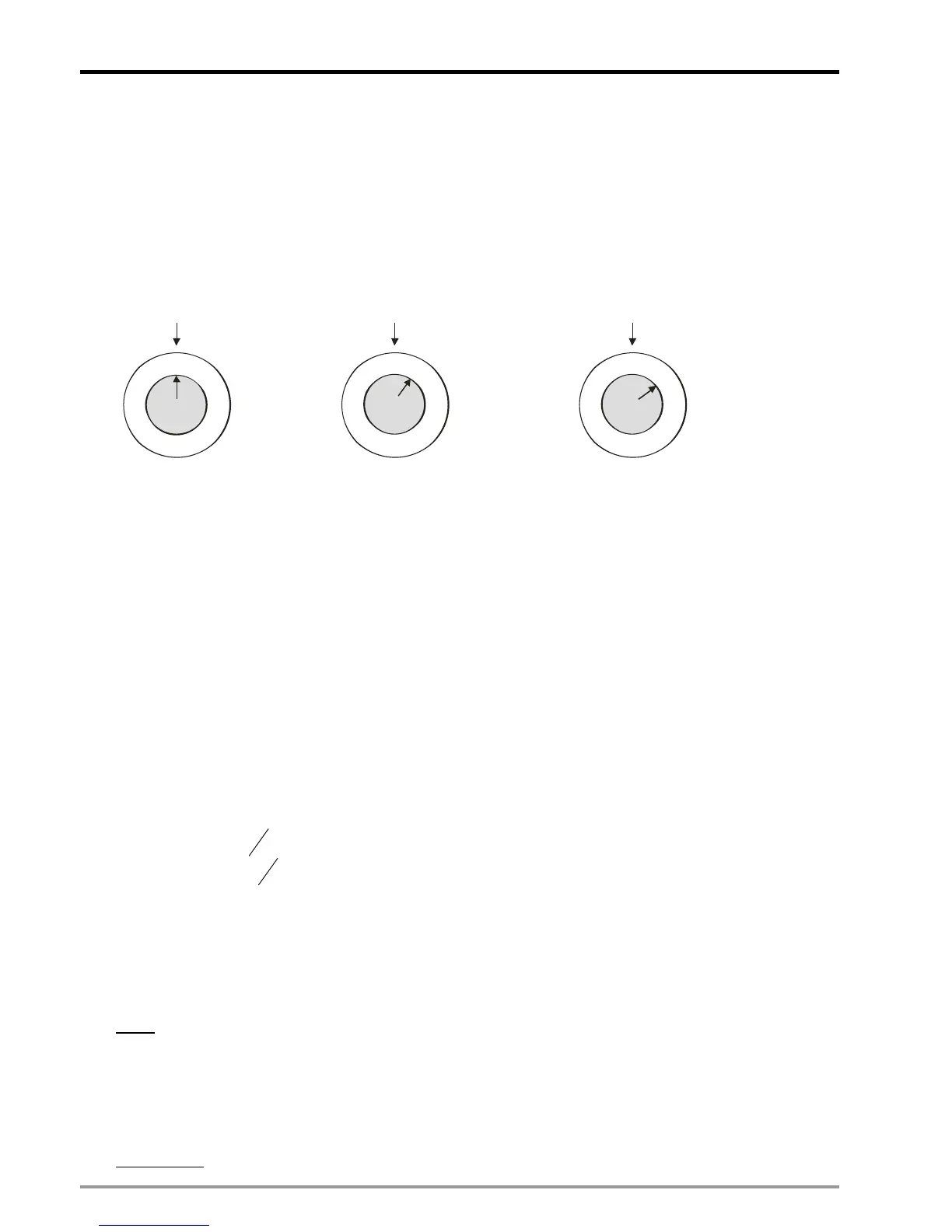
In field application, errors occur between the actual output position on device and the target output position
on E-CAM curve. In addition, the error could be larger as the increase of execution times. Aiming at this
problem we need to apply offset compensation according to the error value between DOG signal and the
end point of Slave position (D108). Fisrt, backup the initial value of D108 (Diagram A). Second, compare the
value in backup register (D128) with D108, which has errors to the initial value (Diagram B, C). Third, take
the difference between the 2 registers as the reference value for offset compensation.
Dog
D108=0
Dog
D108=100
Dog
D108=200
(A)
(B)
(C)
End point of
Slave position
End point of
Slave position
End point of
Slave position
Application Methods:
1. Read initial Slave error. The initial error is the value obtained by substracting the captured value at DOG
with the captured value at E-CAM completion.
2. When the Slave error increases in the next cycle, substrct the increased Slave error with the initial Slave
error, and we can have the real Slave error.
3. Substract Length per round of Slave, which is one of the E-CAM parameter, with the real Slave error and
we can have the real error between the results of E-CAM output and the device output. On this basis,
we conduct offset compensation for the error.
4. When the real error is between “± half of Slave length”, take the real error as the offset value directly.
5. When the real error exceeds “± half of Slave length”, follow the below rule:
⎪
⎩
⎪
⎨
⎧
×+=⇒−<
×=⇒>
ratio OffsetSlave of lengtherror RealOffsetSlave of length error Real
ratio OffsetSlave of lengtherror RealOffsetSlave of length error Real
)(
2
1
)-(
2
1
6. In the next cycle, input the modified length of Slave (with offset) by DTO instruction and the offset
compensation is completed.
Application Example
Setup
:
The example is used for judging if real error between DOG switch and E-CAM completion exists. When error
occurs, calculate offset value for compensation on the length of Slave. In this case, D302 refers to the
modified length of Slave.
Control Steps
:

 Loading...
Loading...










