Chapter 12 Description of Parameter Settings
ME300
It returns to AUTO or REMOTE mode whenever you cycle the power. If you use a multi-function
input terminal to switch between HAND (LOCAL) and AUTO (REMOTE) mode, the highest priority
is the multi-function input terminal.
The pulse of Pr.00-20 = 4 (Pulse input without direction command) is input by PG or MI5.
When Pr.00-20 = 9 (PID controller), Pr.08-55 automatically set as 1 at the same time. Pr.08-55
need to be set as 0 for change back to other values.
Operation Command Source (AUTO, REMOTE)
Default: 0
Settings
0: Digital keypad
1: External terminals
2: Communication RS-485 input
Note:
HOA (Hand-Off-Auto) function is
valid only when you use with MO function
setting 42 and 56 or with KPC-CC01 (optional).
Determines the operation frequency source in “AUTO, REMOTE” mode.
In the HOA mode, if the multi-function input terminal (MI) function setting 41 and 42 are OFF, the
drive does not receive any operation command and JOG is invalid.
Default: 0
Settings
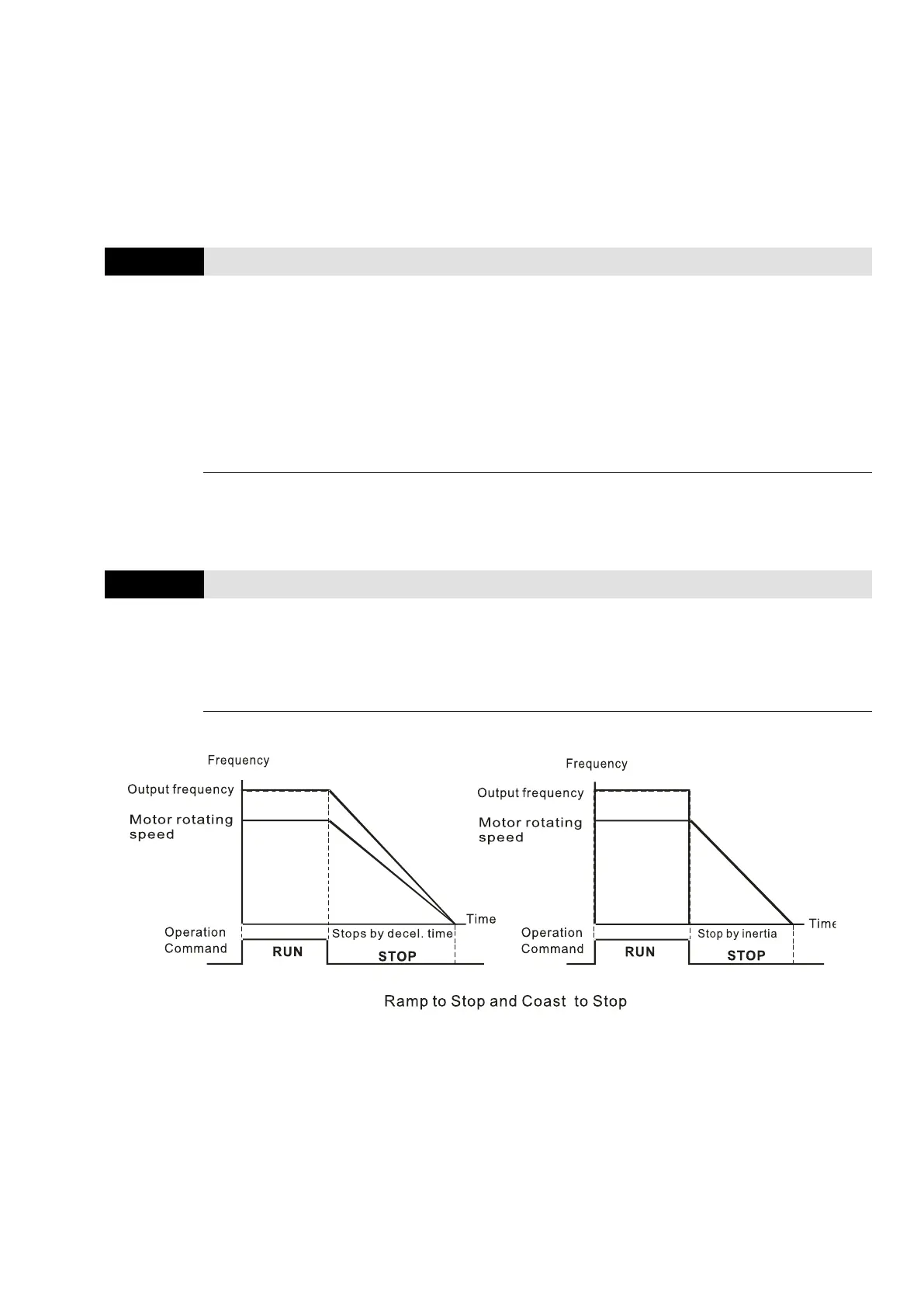
0: Ramp to stop
1: Coast to stop
2: Motor stops by simple positioning
Determines how the motor is stopped when the drive receives the Stop command.
1. Ramp to stop: the AC motor drive decelerates to 0 or the minimum output frequency (Pr.01-09)
according to the set deceleration time, and then to stop (according to Pr.01-07).
2. Coast to stop: the AC motor drive stops output immediately, and the motor coasts to stop
according to the load inertia.
Use “ramp to stop” for the safety of personnel, or to prevent material from being wasted in
applications where the motor must stop immediately after the drive stops. You must set the
deceleration time accordingly.

 Loading...
Loading...




