Chapter 12 Description of Parameter Settings
ME300
42: Crane function
43: Motor speed detection
44: Low current output (use with Pr.06-71–Pr.06-73)
45: UVW output electromagnetic valve ON / OFF switch
46: Master dEb output
51: Analog output control for RS-485 interface
53: Fire mode indication
67: Analog input level reached
69: Indication of Preheating
75: Forward RUN status
76: Reverse RUN status
77: Program Running Indication
78: Program Step Completed Indication
79: Program Running Completed Indication
80: Program Running Paused Indication
81: Multi-pump system error display (only master)
Use this parameter to set the function of the multi-function terminals.
Summary of function settings
Take the normally open contact (N.O.) for example, ON: contact is closed, OFF: contact is open.
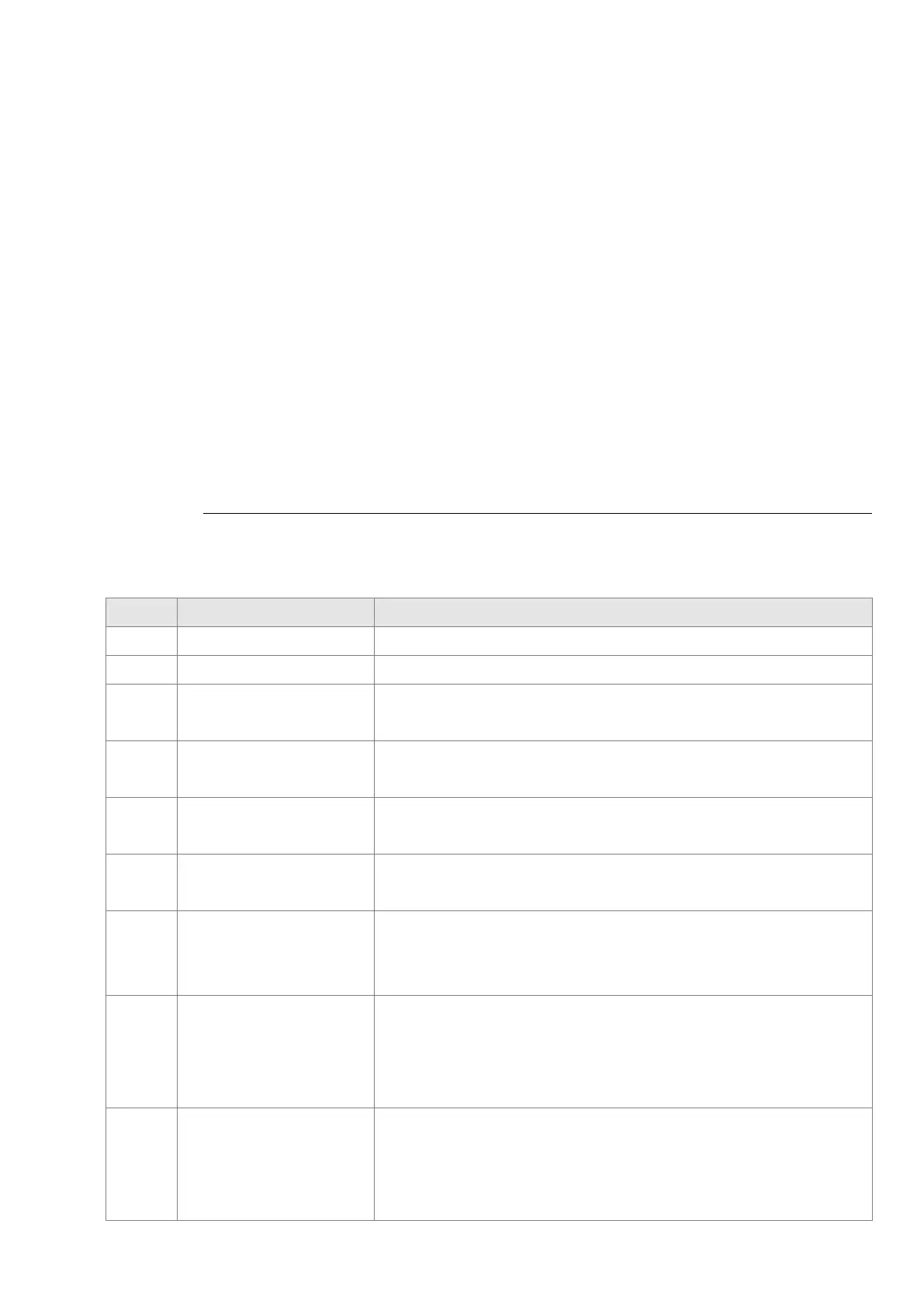
Settings Functions Descriptions
0 No Function Output terminal with no function
1 Indication during RUN Active when the drive is not in S TO P.
2
Operation speed
reached
Active when output frequency of the
drive reaches the setting
frequency.
3
Desired frequency
reached 1 (Pr.02-22)
Active when the desired frequency (Pr.02-22) reached.
4
Desired frequency
reached 2 (Pr.02-24)
Active when the desired frequency (Pr.02-24) reached.
5
Zero speed
(Frequency command)
Active when frequency command = 0
(the drive must be in RUN status).
6
Zero speed, includes
STOP
(Frequency command)
Active when frequency command = 0 or stopped.
7 Over-torque 1
Active when the drive detects over-torque. Pr.06-07 sets the
over-torque detection level (motor 1), and Pr.06-08 sets the
over-torque detection time (motor 1).
Refer to Pr.06-06–06-08.
8 Over-torque 2
Active when the drive detects over-torque. Pr.06-10 sets the
over-torque detection level (motor 2), and Pr.06-11 sets the over-
torque detection time (motor 2).
Refer to Pr.06-09–06-11.

 Loading...
Loading...




